[기고] 24GHz FMCW 레이더 시스템 구현하기
2023-04-06 알렉스 앤드류스(Alex Andrews) 애플리케이션 엔지니어, 아나로그디바이스(Analog Devices, Inc.)
이 글에서는 24GHz ISM 대역에서 주파수 변조 연속파(frequency modulated continuous wave, FMCW) 레이더 시스템 구현에 대해 설명한다. 이러한 유형의 레이더 시스템은 주요 빌딩 블록으로서 램프 생성, 송신 및 수신 스테이지, 하향변환, 샘플링을 필요로 한다.
.JPG)
레이더는 다양한 유형이 존재하지만, 가장 기본적인 의미에서 레이더란 물체 탐지에 사용되는 센서이다. 레이더 유형에 따라서 탐지할 수 있는 물체와 각 물체로부터 수집할 수 있는 정보의 양은 다르다. 어느 한 레이더 시스템이 모든 애플리케이션에 다 잘 맞을 수는 없다.
예를 들어 연속파(continuous wave, CW) 같이 복잡도가 낮은 레이더는 단일 물체의 속도만을 탐지할 수 있는 반면, 구현하기가 비교적 쉽고 하드웨어와 소프트웨어 모두에 있어서 시스템 비용을 낮출 수 있다. 또 어떤 애플리케이션은 물체의 거리와 크기까지 알기 위해 좀더 복잡한 시스템이 필요할 수도 있다. FMCW 레이더는 여러 물체의 거리와 속도를 탐지할 수 있으며, 이용할 수 있는 물체의 데이터, 복잡성, 비용 특성들 사이에서 적절한 절충이 가능하다. 또한 이 기술은 설계하고자 하는 애플리케이션에 유연성을 제공하는데, 이 글에서는 이 부분에 초점을 맞춰 설명한다.
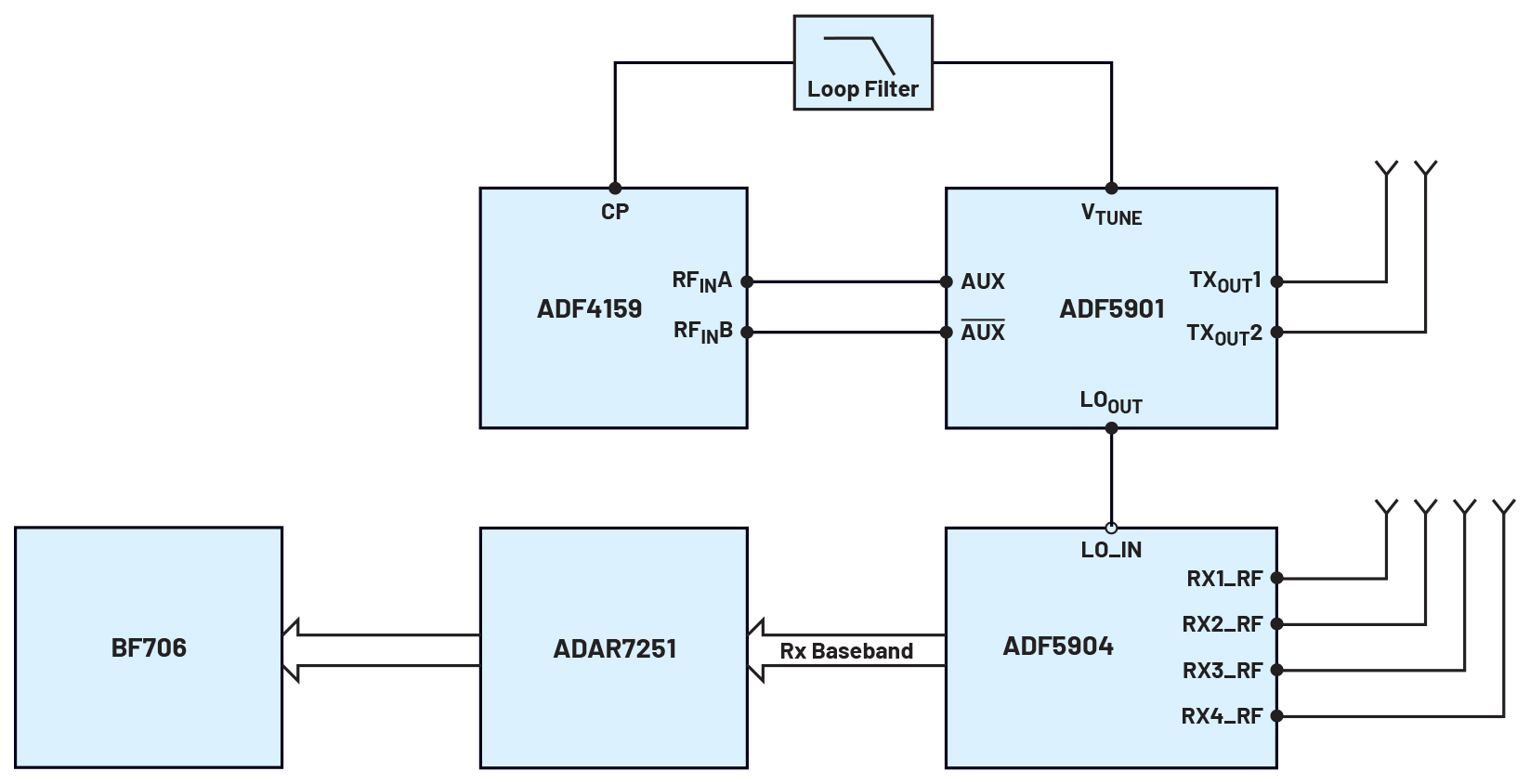
이 글에서는 ADI의 TinyRad 레이더 개발 플랫폼(그림 1의 블록 다이어그램)을 예로 들어 설명한다. 이 TinyRad 시스템 설계에 대한 배경 정보와 함께, 레이더 시스템을 설계할 때 어떤 점들을 고려해야 할지에 대해 알아본다.
무엇을 탐지하고자 하는가?
사용하고자 하는 동작 주파수나 레이더 토폴로지를 결정하기에 앞서, 레이더로 탐지하고자 하는 물체의 파라미터부터 먼저 파악할 필요가 있다. 몇 가지 예를 들면 다음과 같은 것들이 포함된다.
•크기와 소재
•최대 거리
•최대 속도
•다른 물체들과 근접성
• 표적에 대해서 요구되는 정보의 양. 표적에 대해서 선명한 사진이 필요한가, 아니면 단지 블립(blip)이면 되는가?
레이더 반사 면적(radar cross section, RCS)은 어떤 물체가 레이더 상에 얼마나 큰 물체로 나타나는지를 나타내는 척도이다. 사람은 RCS가 대략 1m2이다.
레이더의 동작 거리는 공식 1을 사용해서 계산할 수 있다. 표적의 특성(σ로 나타낸 RCS) 외에도, 파장(λ), 안테나 이득(GTx와 GRx), 송신 및 수신 스테이지 전력(PTx와 PRx) 같은 요소들이 레이더 거리에 영향을 미친다. 최대 거리는 수신 최소 탐지 신호(minimum detectable signal, MDS)를 기반으로 할 때 수신 신호 세기가 시스템에서 가능한 가장 낮은 수준일 때이다. 이 글에서는 기본적인 공식만 보여주지만, 이 공식을 대기 흡수 같은 기타 다양한 효과와 손실을 포함하도록 확장할 수 있다.
 식 (1)
식 (1)
레이더의 최대 거리는 펄스 길이와도 연관이 있으며, 따라서 아날로그-디지털 컨버터(ADC) 샘플링 주파수와도 연관이 있다. 이 거리를 최대 유효탐지 거리(maximum unambiguous range, MUR)라고 한다. 이 거리는 송신 펄스가 반사되어서 유의미한 레이더 데이터를 도출하기까지 필요한 시간과도 연관이 있다.
FMCW 레이더가 탐지할 수 있는 최대 속도는 공식 2에서 보듯이 파장 및 스윕 시간과 관계가 있다.
 식 (2)
식 (2)
변조 간격이 280μs이라고 한다면 최대 표적 속도는 대략 시속 44킬로미터이다.
이들 램프로부터 결과적인 베이스밴드 신호를 처리하기 위해서는 먼저 샘플링을 해야 하며, 따라서 ADC 샘플 레이트와 샘플 수(N) 역시 실제적으로 최대 속도와 연관이 있다. 빠른 램프를 샘플링하기 위해서 샘플 수를 낮출 수 있는데, 이렇게 하면 속도 분해능을 저하시킬 것이다.
.jpg) 식 (3)
식 (3)
베이스밴드 레이더 신호 샘플링에 관해서는 뒤에 나올 “ADC와 샘플링” 부분에서 자세히 설명할 것이다.
주파수 관련 고려사항
높은 주파수로 동작하는 것은 몇 가지 측면에서 이점을 제공한다. 더 작은 파장은 보다 우수한 거리 탐지 및 물체 식별 데이터를 제공하며, 또한 파장이 짧으면 안테나 패턴을 더 작게 할 수 있다. 이는 전반적으로 시스템의 크기를 보다 소형화 할 수 있게 해준다. 경우에 따라 안테나를 IC 안에 내장할 수도 있다. 하지만 뒤에서도 살펴보겠지만, 높은 주파수가 항상 좋은 것만은 아니다.
FMCW 레이더의 경우, 스윕 대역폭(램프 시작 주파수부터 정지 주파수까지)이 거리 분해능과 직접적으로 연관성을 갖는다. 공식 4는 거리 분해능을 계산하는 것을 보여준다. 거리 분해능은 동일 베어링에서 2개의 표적을 각기 별도의 표적으로 구분하기 위해 서로 떨어져야 하는 최소 거리를 말한다. 레이더 동작 주파수를 선택할 때 가장 중요한 고려사항 중 하나가 바로 이 필요한 거리 분해능이다. 거리 분해능을 향상시키려면 더 넓은 주파수 범위를 스윕해야 하는데, 대역 한계 때문에 이렇게 하기가 항상 가능한 것은 아니다.
25GHz는 ISM 대역인데, 이는 레이더를 상업용 제품으로 판매하는 데 있어서 시장의 제약이 덜하는 것을 뜻한다. 지역별로 약간씩 차이는 있으나, 대체로 24GHz ISM 대역은 24GHz~24.25GHz다. 공식 4에 대입해보면, 24GHz 대역의 경우 거리 분해능은 약 60센티미터에 해당한다.
 식 (4)
식 (4)
77GHz 대역은 대역폭 할당이 최대 5GHz로 비교적 넓다. 그러므로 뛰어난 거리 분해능이 가능하나, 몇 가지 중대한 한계점들을 수반한다. 77GHz 대역의 가장 큰 단점은, 주로 차량용 애플리케이션으로 한정된다는 것이다. 산업용 탱크 수위 탐지 같이 지역에 따라서 약간의 예외는 있으나, 대부분 77GHz 레이더는 차량용 시장으로 제한되어 있다.
또 다른 단점은, 요구되는 램프 속도에 따라 이들 주파수에서 5GHz의 대역폭을 스위핑하면 표준 아날로그 위상 고정 루프(PLL) 및 전압 제어 발진기(VCO) 토폴로지가 허용 가능한 수준의 선형성을 가진 램프를 생성하기가 어렵다는 것이다. 결과적으로 램프 생성 하나만 보더라도 레이더 시스템이 복잡해진다(그러므로 비싸진다).
77GHz 대역에서 동작할 때 또 다른 단점은 PCB 설계, 제조, 안테나 캘리브레이션을 더 신중하게 해야 한다는 것이다.
60GHz 대역은 77GHz 대역처럼 대역폭 할당이 넓고 많은 이점들을 제공할 뿐만 아니라, 24GHz 대역과 마찬가지로 ISM 대역이다. 그런데 산소의 전자기 흡수 특성 때문에, 60GHz 신호는 공기 중으로 전달되면서 감쇠에 있어서 상당한 스파이크를 겪는다. 60GHz 레이더는 유효 거리가 종종 20미터 이하이다.
각 분해능
레이더의 각 분해능(angular resolution)은 수신 안테나 구경(D)과 소자 수의 함수 관계이다. 표적의 위치를 구하기 위해서는 최소 2개의 수신 채널이 필요하다. 이들 수신 안테나 사이의 거리를 알면 한 개의 채널에 반사 신호가 도착할 때의 지연시간과 또 다른 채널에 도착할 때의 지연시간을 비교해서 레이더를 기준으로 한 표적의 위치를 삼각측량법으로 구할 수 있다.
 식 (5)
식 (5)
대부분의 FMCW 레이더는 표적을 2D 공간에 표시한다. 다시 말해, 표적의 높이는 탐지하지 않는다. 높이를 계산하기 위해 이용할 수 있는 첨단 기법들이 몇 가지 있다. 모노펄스 레이더가 하나의 예다. 이를 위해서는 송신 신호에 추가적인 인코딩이 필요하며, 이 인코딩 데이터를 기반으로 표적의 높이를 계산할 수 있다. 여기에는 복잡한 램프 프로파일 시스템과 향상된 후처리 알고리즘이 필요하다. 이 글에서는 표적을 2D 도메인에 표시하는 표준 FMCW 레이더 토폴로지를 집중적으로 다룬다.
램프 생성(ramp generation)
앞서 ‘무엇을 탐지하고자 하는가?’ 단락에서 언급했듯이, 표적의 속도에 따라 램프의 속도가 결정된다.
FMCW 스윕을 생성하기 위한 가장 간단한 방법은 주파수 합성기로서 PLL과 VCO를 사용하는 것이다. 어떤 PLL 제품은 내부에 주파수 스위퍼를 포함한다. 이러한 제품은 내부 타이머와 클록을 사용해서 자동으로 PLL N 카운터를 내부적으로 증가시킨다. N 카운터를 증가시키면 램프 프로파일을 생성하는 출력 주파수를 높인다. 특정 애플리케이션에 따라서 정확한 프로파일과 타이밍을 맞춤화할 수 있다. 예를 들어 톱니파나 삼각파를 사용하거나, 또는 램프 지연 간격을 추가할 수 있다.
FMCW 스윕을 생성하는 또 다른 기법은 외부의 파형 생성기를 사용해서 PLL 차지 펌프와 VCO 사이의 전압 튜닝에 이 파형을 얹는 것이다. 이 외에 PLL을 정주파수 셋업으로 사용하고 디지털 직접 합성기(DDS)를 레퍼런스 입력 신호로 사용하는 방법도 있다. DDS는 빠른 주파수 스위칭을 가능하게 하므로, 레퍼런스를 스윕해서 PLL로부터 램프 파형을 생성할 수 있다.
FMCW 레이더 애플리케이션의 경우, FMCW 램프를 구성하는 빠른 주파수 홉 때문에 PLL 동기 시간(lock time)이 매우 중요하다. PLL에 단일 대역 VCO를 결합했을 때 동기 시간에 있어서 가장 큰 비중을 차지하는 요인은 루프 필터의 대역폭이다. 루프 대역폭이 높으면 안정화 시간이 빨라지지만, 대신에 대역내 위상 잡음이 증가한다. 루프 대역폭이 너무 좁으면 주파수 램프가 선형적이지 않을 수 있고, 특히 다운램프에서 그렇다. 과도한 언더슈트가 발생할 수도 있는데, 이는 스펙트럼 방사/적합성 문제로 이어질 수 있다.
빠르게 스윕하는 FMCW의 경우, PLL의 루프 필터 대역폭을 넓게 하는 데 있어서 한계가 있을 수 있다. 경험상으로는 10/PFD 주파수를 넘지 않도록 하는 것이 바람직하다. 실제적으로는 2MHz 이상의 루프 필터 대역폭을 달성하기가 어려울 수 있다. 커패시터 크기를 작게 해야 하고 PCB 차원에서 존재하는 기생 성분들이 필터 설계를 까다롭게 하기 때문이다. 능동형 루프 필터를 사용한다면 연산 증폭기의 이득 대역폭 곱(GBP)을 PFD 주파수보다 최소한 10배 이상 더 높게 하는 것이 원칙이다.
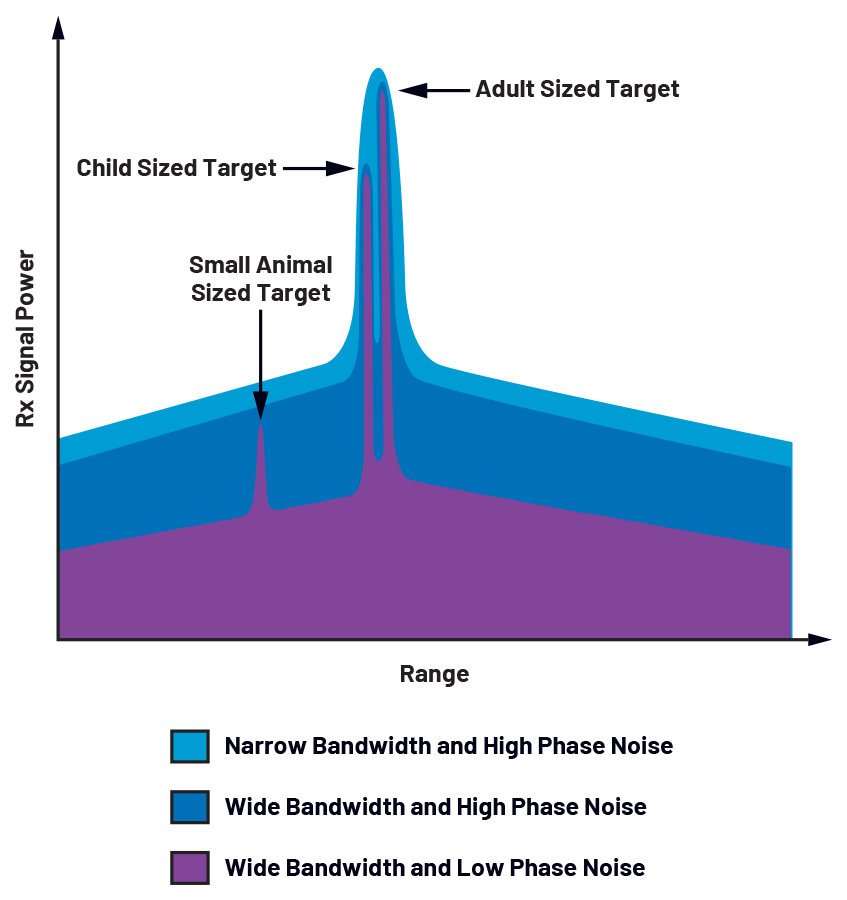 그림 2. 여러 개의 표적을 탐지한 레이더 목업 다이어그램. 표적들을 탐지하고 각각의 표적을 구분하는 데 있어서 램프 대역폭과 위상 잡음이 어떠한 영향을 미치는지 알 수 있다.
그림 2. 여러 개의 표적을 탐지한 레이더 목업 다이어그램. 표적들을 탐지하고 각각의 표적을 구분하는 데 있어서 램프 대역폭과 위상 잡음이 어떠한 영향을 미치는지 알 수 있다.
아나로그디바이스(Analog Devices)가 무료로 제공하는 소프트웨어인 ADIsimPLL™을 사용하면 램프 생성기를 포함하는 ADI PLL에 대해 주파수 도메인 성능 분석과 시간 도메인 램프 분석을 실시할 수 있다. “ADIsimPLL을 사용하여 ADF4158로 주파수 램프 시뮬레이션하기”라는 제목의 동영상에서 자세한 내용을 확인할 수 있다.
ADF4159 PLL은 램프 생성 기능을 포함하고 있으며, ADIsimPLL 소프트웨어에 포함되어 있어 이 글의 예제용 램프 생성기로 채택하고 있다. ADF4159의 최대 동작 주파수는 13GHz이다. 그러므로 24GHz ISM 대역을 커버하는 램프를 달성하기 위해서는 PLL 입력에 divide-by-2 출력인 VCO를 연결해야 한다.
송신(Tx) 스테이지
송신 레이더 신호를 효율적으로 전달하기 위해서는 FMCW 램프에 충분한 이득을 제공하고, 안테나와 인터페이스하기 위해서는 송신 스테이지가 필요하다. 앞서 언급했듯이, 레이더의 거리는 송신 신호의 강도와 함수 관계이다.
또한 이전 단락에서 설명한 것처럼 PLL로 위상을 고정하기 위해서 VCO가 필요하다. 송신 스테이지는 개별 소자들로 구현할 수 있는데, 그러면 VCO의 출력을 PLL 피드백과 PA 스테이지로 분할해야 한다. 통합 솔루션으로는 ADF5901 MMIC 송신 IC를 사용할 수 있다. 이 디바이스는 divide-by-2 출력을 제공하는 24GHz~24.25GHz VCO를 내장하고 있으며, ADF4159 PLL과 함께 사용할 수 있다. 또한 ADF5901은 최대 8dBm의 출력 전력을 제공하는 전력 증폭기(PA)를 출력에 포함하고 있다. 이 정도면 100미터 내외의 거리까지 전송하기에 충분하다(RCS = 1m2). 거리를 더 늘리고자 한다면 외부 PA 스테이지를 추가하여 사용하면 된다.
ADF5901은 2개의 송신 출력 채널을 제공한다. 보통의 동작을 위해서는 둘 중 하나만 사용한다. 첨단 MIMO(multiple input multiple output) 동작을 위해서는 두 송신 채널을 번갈아 사용한다(뒷부분의 “그 밖의 기능” 단락 참조).
수신된 레이더 신호의 하향변환을 위해서는 LO 신호가 필요하다. LO 주파수는 매 순간 송신 신호와 정확하게 동일한 주파수여야 한다. 하향변환에 관해서는 “수신 스테이지(Rx)와 하향변환” 부분에서 자세히 설명할 것이다.
수신 스테이지(Rx)와 하향변환
앞에서 살펴보았듯이, 표적의 각 위치를 삼각측량법으로 계산하기 위해서는 한 개 이상의 수신 채널이 필요하다. 또한 앞에서 설명했듯이, 레이더 시스템으로 표적을 탐지할 수 있는 각 오프셋에 있어서 정확도(각 분해능)는 수신 채널 수와 직결된다. 이 글에서 제안하는 레이더 시스템은 수신 스테이지에 ADF5904 수신 MMIC를 채택하고 있다. ADF5904는 4개 수신 채널을 사용해서 웬만한 정도의 각 분해능을 제공한다.
채널 수를 늘리는 한 가지 방법은 수신 IC를 여러 개 사용하는 것이다. 이때는 이들 IC 모두가 동일한 LO 신호를 수신하도록 함으로써 정확한 하향변환을 달성할 수 있다. 만약 2개의 ADF5904 IC를 사용한다면 ADF5901의 LO 출력 전력과 ADF5904의 LO 입력 감도를 감안할 때 윌킨슨 분배기(Wilkinson divider) 같은 수동형 스플리터로 충분하다. 2개 이상의 ADF5904 IC를 사용해서 수신 채널을 더 늘리고자 한다면, LO 출력에 PA(HMC863ALC4 같은)의 형태로 약간의 이득이 필요할 것이다.
수신 채널 수가 많을수록 더 높은 성능의 레이더 구현이 가능하지만, 그 대신 데이터 부하가 늘어나며, 이는 다시 더 높은 프로세싱 능력을 필요로 한다. 이미징 레이더에 많은 수신 채널을 사용하면 실시간 프로세싱을 위해서 고가의 FPGA 솔루션과 복잡한 펌웨어 루틴이 필요할 것이다. 하지만 채널 수를 제한하면 프로세싱과 데이터 전송을 위해서 상대적으로 저렴한 DSP를 사용할 수 있다. 따라서 이 글에서는 4개의 수신 채널을 제공하는 ADF5904 한 개를 사용하는 방안을 예로 들어서 설명하고 있다. 유효 수신 채널을 늘리는 또 다른 방법은 이 글에서 선택하고 있는 2채널 송신 구성으로 MIMO 동작을 사용하는 것이다.
표적으로부터 반사되는 신호의 세기는 송신 신호 세기의 일부에 불과하다. 그러므로 통상적으로 LNA를 사용해서 수신 신호를 증폭한다. 낮은 반사 신호 세기와 관련한 또 다른 고려사항은, 수신 스테이지의 잡음 지수(NF)와 결과적인 출력 잡음이 최소 탐지 신호(minimum detectable signal, MDS)에 영향을 미치고 시스템의 최대 거리를 제한할 수 있다는 것이다.
요구되는 신호대 잡음비(SNR)에 따라서, NF가 나쁘면 표적을 탐지하지 못할 수도 있다. 일반적인 통신 시스템은 통상적으로 3dB의 SNR을 목표로 한다. 레이더 시스템은 그 정도는 아니고 통상적인 최소 SNR이 10~15dB이다. 정확한 SNR 요구 사항은 애플리케이션마다 다를 수 있다. 모든 표적들을 최대한 놓치지 않고 감지하는 것이 중요한 애플리케이션은 이보다 낮은 최소 SNR을 요구할 것이다. 반면에 표적의 오탐지를 최소화하는 것이 중요한 애플리케이션이라면 좀더 높은 SNR이 나은 방법이다. ADF5904는 잡음 지수가 10dBm인데, 이는 1MHz 베이스밴드 대역폭과 10dB의 SNR일 때 약 -94dB의 MDS에 해당한다.
FMCW 레이더 하향변환을 위해서는 수신 신호를 송신 신호와 비교해야 한다. 이 사례의 경우에는 송신 신호에 해당하는 것이 LO 신호이다. LO는 믹서로 피드되고 수신 신호는 하향변환된다. FMCW 레이더에서 흔히 사용되는 믹서 토폴로지는 ‘호모다인(homodyne)’ 또는 ‘zero-IF 믹서’라고 불리는 직접 변환 방식이다. ADF5904는 직접 변환 믹서를 포함한다. 이 믹서의 출력은 IQ가 아닌 실제 데이터이다. 일련의 고속 푸리에 변환(FFT) 분석을 실시해서 위상을 검출하고 표적 속도를 도출할 수 있다(TinyRad에 사용되는 데이터 형식에 관해서는 “새롭게 떠오르는 산업용 대량 시장을 위한 혁신적인 비접촉 센서를 가능케 하는 24GHz Demorad 레이더 솔루션” 기사 참조).
ADC와 샘플링
FMCW 데이터를 처리하고 유용한 표적 정보를 도출하기 위해서는 먼저 하향변환 베이스밴드 파형을 각각 아날로그 프런트 엔드(AFE)와 ADC를 사용해서 필터링하고 샘플링해야 한다. 어떠한 ADC를 선택할 것인지는 채널 수, 동적 범위, SNR, 각 채널의 동시 샘플링 능력, 견고한 필터링 옵션 등 ADC와 관련해서 일반적으로 고려해야 하는 특성들 외에도, 레이더가 고속으로 움직이는 여러 개의 표적들을 검출할 수 있도록 빠른 FMCW 램프를 사용할 것인지 또는 느린 램프로도 충분한 활용 사례인지에 따라서 달라질 것이다.
이 글에서 선택하고 있는 ADF5904 수신 IC는 최대 10MHz의 복조 대역폭을 지원하므로, 이 글에서 제안하는 레이더 시스템은 저속과 고속 FMCW 램프를 모두 지원할 수 있다.
저속 램프는 베이스밴드 대역폭이 500kHz 대로 낮지만, 고속 FMCW 램프는 대역폭이 10MHz 혹은 그 이상에 이르는 베이스밴드 신호를 지원하기 위해서 고속 신호 체인을 필요로 할 것이다.
ADAR7251은 ADF5904에 곧바로 인터페이스하도록 설계되었으며, 따라서 낮은 잡음과 동적 범위 특성 때문에 느린 FMCW 램프에 사용하기에 적합하다.
빠르게 움직이는 표적들을 탐지해야 하는 애플리케이션의 경우, 또 다른 옵션으로서 AD8285를 사용할 수 있다. AD8285는 최대 12MHz의 더 넓은 입력 대역폭을 지원하고 더 빠른 샘플 레이트가 가능한 대신에, ADAR7251에 비해 잡음 성능, 이득, 필터링 옵션, 분해능 특성이 약간 떨어질 수 있다.
빠른 FMCW 램프에서 데이터 부하가 증가하면 늘어난 데이터를 처리하기 위해서 FPGA가 필요할 수 있는 반면, 좀더 느린 속도의 램프는 프로세싱과 데이터 전송을 위해서 전력 소모가 더 적고 비용도 더 저렴한 DSP를 사용할 수 있다. 이 글에서 제안하고 있는 시스템은 성능과 비용이 균형을 이루는 것을 목표로 하고 있으며, 이 점에서 ADC로서 ADAR7251을 선택하고 있다.
안테나 설계
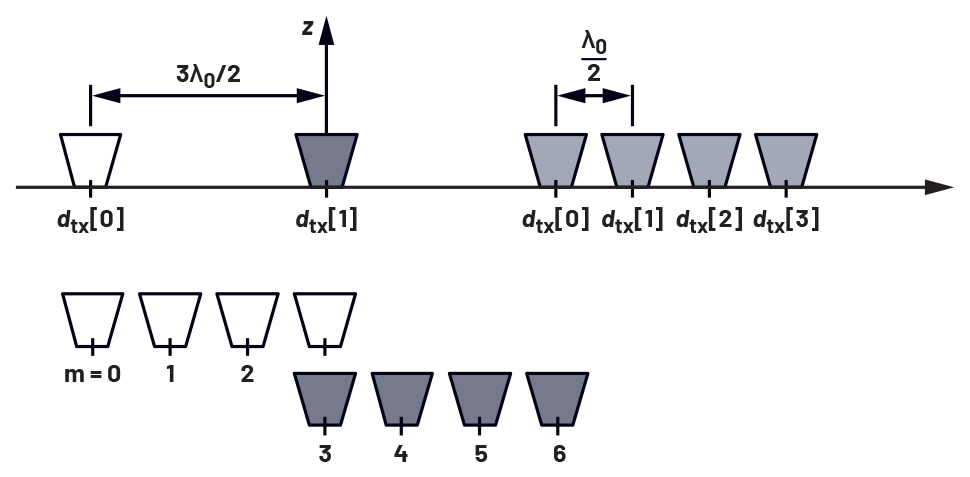
안테나 설계는 매우 복잡한 주제이며 이 글의 범위를 벗어난다. 각 위치를 정확히 계산하기 위해서는 수신 소자들이 0.5λ 이상 떨어지지 않아야 한다. 이러한 설계에는 송신 채널과 수신 채널 각각에 똑같은 중앙 급전식 패치 안테나를 사용한ADI다. 송신 채널은 MIMO 동작을 위해 0.5λ 이상 떨어트려야 한다. MIMO 기법에 관해서는 다음 단락에서 자세히 설명하겠지만, 가상 어레이가 동작하도록 하기 위해서는 각 안테나 사이의 거리를 캘리브레이션하고 저장해야 한다.
그 밖의 기능
이 글에서는 MIMO 기술이 몇 차례 언급되었다. MIMO 기법을 사용하면 레이더의 유효 수신 채널 수를 늘릴 수 있으며, 그럼으로써 각 분해능을 높일 수 있다.
MIMO 동작이 아닌 경우, 오직 한 개의 송신 채널만 사용하며, 4개의 수신 채널과 짝을 이루었을 때 앞서 소개한 안테나 구성일 경우 각 분해능이 약 30°이다.
이 레이더에 MIMO 모드를 적용하면 송신 신호는 하나의 송신 채널(Tx1)을 통해 전송되고 그 다음 레이더 첩(chirp)이나 램프가 다른 송신 채널(Tx2)로 전송된다. 이렇게 송신 채널이 분리됨에 따라 송신 신호가 Tx2와 Tx1으로부터 전송되었을 때 수신단에서의 도달 각도(AoA)에 오프셋이 발생한다. 각 소자들 사이의 간격을 구하여 저장하고 캘리브레이션하면 이 오프셋을 사용해서 추가적인 가상 안테나 소자들을 생성할 수 있다.
따라서 MIMO 모드일 때는 이 레이더에 실질적으로는 7개의 수신 소자를 사용하는 셈이다. 4개는 실제 물리적 소자이고, 4개는 Tx2로 나타나는 오프셋 가상 소자들이다. 이 때, 가운데 위치한 소자는 하나의 실제 소자와 가상 소자가 중첩된 것이므로 총 7개의 수신 소자가 되는 것이다. 이 설계 예시에 MIMO 동작을 사용하면 각 분해능은 20° 이하로 향상된다.
맺음말
이 글에서는 FMCW 레이더를 구현하는 데 있어서 시스템 차원에서 필요로 하는 빌딩 블록들을 살펴보았다. 동작 주파수는 ISM 대역인 24GHz를 목표로 했다. 실시간 데이터 분석을 쉽게 하고자 저속의 FMCW 램프에 좀더 느린 속도의 샘플링 신호 체인과 낮은 데이터 속도를 사용했다.
ADI의 24GHz 칩셋은 우수한 통합 수준과 뛰어난 성능 덕분에, 전적으로 개별 부품들을 사용하는 솔루션에 비해 레이더 설계를 간소화하도록 한다. ADI의 TinyRad 플랫폼은 사전에 구현된 평가 플랫폼으로서, 이 칩셋을 기반으로 하고 필요한 소프트웨어를 포함하므로 사용자는 평가 작업을 쉽고 빠르게 할 수 있으며 하드웨어를 처음부터 일일이 개발해야 할 때 드는 시간도 단축할 수 있다. TinyRad의 성능과 동작에 관한 상세 정보는 ADI 웹사이트 해당 제품 페이지의 사용자 가이드에서 확인할 수 있다.
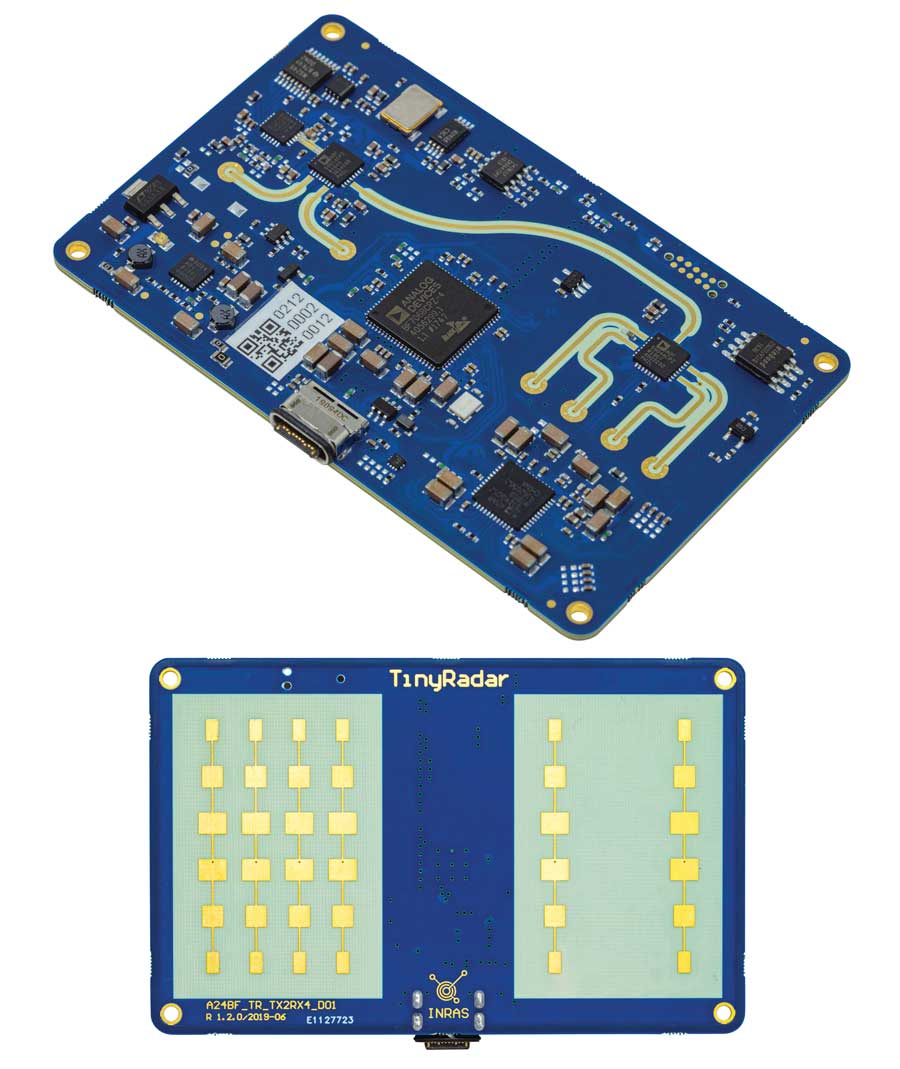
그림 4. EV-TINYRAD24G는 신용카드 크기의 보드에서 완전한 FMCW 레이더 시스템을 제공한다. 위쪽 그림에서는 상단면에 ADI의 24GHz 칩셋이 탑재된 것을 볼 수 있다. 아래 그림에서는 송신 및 수신 중앙 급전식 패치 안테나를 볼 수 있다.
TinyRad는 다양한 애플리케이션에 우수한 성능을 제공하며, 특히 초보 레이더 설계 엔지니어들에게 유용한 솔루션을 제공한다. 다만 빠르게 움직이는 표적을 탐지해야 하거나(표적 크기에 따라서 다를 수 있으나) 거리가 200미터 이상인 경우와 같이 까다로운 활용 사례에는 성능이 불충분할 수 있다.
그러므로 구체적인 활용 사례에 따라서 TinyRad 설계를 좀더 맞춤화할 수 있는 방법들을 제시하고 있다. EV-RADAR-MMIC는 커넥터형 평가 보드로서, TinyRad의 플러그-앤-플레이 기능들은 줄어든 대신에 송신 및 수신 채널에 외부 ADC, 프로세서, 추가적인 이득 스테이지를 연결할 수 있으므로 추가적인 맞춤화가 가능하다.
저자 소개
알렉스 앤드류스(Alex Andrews)는 2017년에 아나로그디바이스(Analog Devices)에 입사했으며, 퀸즈 대학 - 벨파스트에서 전기전자공학 학사학위를 취득했다. ADI 입사 후 아일랜드 리머릭에 거주하면서 브로드 마켓 주파수 생성 그룹의 애플리케이션 엔지니어로서 위상 동기 루프(PLL) 및 24GHz 레이더 제품을 주로 담당하고 있다.
레이더는 다양한 유형이 존재하지만, 가장 기본적인 의미에서 레이더란 물체 탐지에 사용되는 센서이다. 레이더 유형에 따라서 탐지할 수 있는 물체와 각 물체로부터 수집할 수 있는 정보의 양은 다르다. 어느 한 레이더 시스템이 모든 애플리케이션에 다 잘 맞을 수는 없다.
예를 들어 연속파(continuous wave, CW) 같이 복잡도가 낮은 레이더는 단일 물체의 속도만을 탐지할 수 있는 반면, 구현하기가 비교적 쉽고 하드웨어와 소프트웨어 모두에 있어서 시스템 비용을 낮출 수 있다. 또 어떤 애플리케이션은 물체의 거리와 크기까지 알기 위해 좀더 복잡한 시스템이 필요할 수도 있다. FMCW 레이더는 여러 물체의 거리와 속도를 탐지할 수 있으며, 이용할 수 있는 물체의 데이터, 복잡성, 비용 특성들 사이에서 적절한 절충이 가능하다. 또한 이 기술은 설계하고자 하는 애플리케이션에 유연성을 제공하는데, 이 글에서는 이 부분에 초점을 맞춰 설명한다.
이 글에서는 ADI의 TinyRad 레이더 개발 플랫폼(그림 1의 블록 다이어그램)을 예로 들어 설명한다. 이 TinyRad 시스템 설계에 대한 배경 정보와 함께, 레이더 시스템을 설계할 때 어떤 점들을 고려해야 할지에 대해 알아본다.
그림 1. EV-TINYRAD24G 블록 다이어그램. 각각의 블록에 대해서는 본문에서 자세히 설명한다.
무엇을 탐지하고자 하는가?
사용하고자 하는 동작 주파수나 레이더 토폴로지를 결정하기에 앞서, 레이더로 탐지하고자 하는 물체의 파라미터부터 먼저 파악할 필요가 있다. 몇 가지 예를 들면 다음과 같은 것들이 포함된다.
•크기와 소재
•최대 거리
•최대 속도
•다른 물체들과 근접성
• 표적에 대해서 요구되는 정보의 양. 표적에 대해서 선명한 사진이 필요한가, 아니면 단지 블립(blip)이면 되는가?
레이더 반사 면적(radar cross section, RCS)은 어떤 물체가 레이더 상에 얼마나 큰 물체로 나타나는지를 나타내는 척도이다. 사람은 RCS가 대략 1m2이다.
레이더의 동작 거리는 공식 1을 사용해서 계산할 수 있다. 표적의 특성(σ로 나타낸 RCS) 외에도, 파장(λ), 안테나 이득(GTx와 GRx), 송신 및 수신 스테이지 전력(PTx와 PRx) 같은 요소들이 레이더 거리에 영향을 미친다. 최대 거리는 수신 최소 탐지 신호(minimum detectable signal, MDS)를 기반으로 할 때 수신 신호 세기가 시스템에서 가능한 가장 낮은 수준일 때이다. 이 글에서는 기본적인 공식만 보여주지만, 이 공식을 대기 흡수 같은 기타 다양한 효과와 손실을 포함하도록 확장할 수 있다.
식 (1)레이더의 최대 거리는 펄스 길이와도 연관이 있으며, 따라서 아날로그-디지털 컨버터(ADC) 샘플링 주파수와도 연관이 있다. 이 거리를 최대 유효탐지 거리(maximum unambiguous range, MUR)라고 한다. 이 거리는 송신 펄스가 반사되어서 유의미한 레이더 데이터를 도출하기까지 필요한 시간과도 연관이 있다.
FMCW 레이더가 탐지할 수 있는 최대 속도는 공식 2에서 보듯이 파장 및 스윕 시간과 관계가 있다.
식 (2)변조 간격이 280μs이라고 한다면 최대 표적 속도는 대략 시속 44킬로미터이다.
이들 램프로부터 결과적인 베이스밴드 신호를 처리하기 위해서는 먼저 샘플링을 해야 하며, 따라서 ADC 샘플 레이트와 샘플 수(N) 역시 실제적으로 최대 속도와 연관이 있다. 빠른 램프를 샘플링하기 위해서 샘플 수를 낮출 수 있는데, 이렇게 하면 속도 분해능을 저하시킬 것이다.
식 (3)베이스밴드 레이더 신호 샘플링에 관해서는 뒤에 나올 “ADC와 샘플링” 부분에서 자세히 설명할 것이다.
주파수 관련 고려사항
높은 주파수로 동작하는 것은 몇 가지 측면에서 이점을 제공한다. 더 작은 파장은 보다 우수한 거리 탐지 및 물체 식별 데이터를 제공하며, 또한 파장이 짧으면 안테나 패턴을 더 작게 할 수 있다. 이는 전반적으로 시스템의 크기를 보다 소형화 할 수 있게 해준다. 경우에 따라 안테나를 IC 안에 내장할 수도 있다. 하지만 뒤에서도 살펴보겠지만, 높은 주파수가 항상 좋은 것만은 아니다.
FMCW 레이더의 경우, 스윕 대역폭(램프 시작 주파수부터 정지 주파수까지)이 거리 분해능과 직접적으로 연관성을 갖는다. 공식 4는 거리 분해능을 계산하는 것을 보여준다. 거리 분해능은 동일 베어링에서 2개의 표적을 각기 별도의 표적으로 구분하기 위해 서로 떨어져야 하는 최소 거리를 말한다. 레이더 동작 주파수를 선택할 때 가장 중요한 고려사항 중 하나가 바로 이 필요한 거리 분해능이다. 거리 분해능을 향상시키려면 더 넓은 주파수 범위를 스윕해야 하는데, 대역 한계 때문에 이렇게 하기가 항상 가능한 것은 아니다.
25GHz는 ISM 대역인데, 이는 레이더를 상업용 제품으로 판매하는 데 있어서 시장의 제약이 덜하는 것을 뜻한다. 지역별로 약간씩 차이는 있으나, 대체로 24GHz ISM 대역은 24GHz~24.25GHz다. 공식 4에 대입해보면, 24GHz 대역의 경우 거리 분해능은 약 60센티미터에 해당한다.
식 (4)77GHz 대역은 대역폭 할당이 최대 5GHz로 비교적 넓다. 그러므로 뛰어난 거리 분해능이 가능하나, 몇 가지 중대한 한계점들을 수반한다. 77GHz 대역의 가장 큰 단점은, 주로 차량용 애플리케이션으로 한정된다는 것이다. 산업용 탱크 수위 탐지 같이 지역에 따라서 약간의 예외는 있으나, 대부분 77GHz 레이더는 차량용 시장으로 제한되어 있다.
또 다른 단점은, 요구되는 램프 속도에 따라 이들 주파수에서 5GHz의 대역폭을 스위핑하면 표준 아날로그 위상 고정 루프(PLL) 및 전압 제어 발진기(VCO) 토폴로지가 허용 가능한 수준의 선형성을 가진 램프를 생성하기가 어렵다는 것이다. 결과적으로 램프 생성 하나만 보더라도 레이더 시스템이 복잡해진다(그러므로 비싸진다).
77GHz 대역에서 동작할 때 또 다른 단점은 PCB 설계, 제조, 안테나 캘리브레이션을 더 신중하게 해야 한다는 것이다.
60GHz 대역은 77GHz 대역처럼 대역폭 할당이 넓고 많은 이점들을 제공할 뿐만 아니라, 24GHz 대역과 마찬가지로 ISM 대역이다. 그런데 산소의 전자기 흡수 특성 때문에, 60GHz 신호는 공기 중으로 전달되면서 감쇠에 있어서 상당한 스파이크를 겪는다. 60GHz 레이더는 유효 거리가 종종 20미터 이하이다.
각 분해능
레이더의 각 분해능(angular resolution)은 수신 안테나 구경(D)과 소자 수의 함수 관계이다. 표적의 위치를 구하기 위해서는 최소 2개의 수신 채널이 필요하다. 이들 수신 안테나 사이의 거리를 알면 한 개의 채널에 반사 신호가 도착할 때의 지연시간과 또 다른 채널에 도착할 때의 지연시간을 비교해서 레이더를 기준으로 한 표적의 위치를 삼각측량법으로 구할 수 있다.
식 (5)대부분의 FMCW 레이더는 표적을 2D 공간에 표시한다. 다시 말해, 표적의 높이는 탐지하지 않는다. 높이를 계산하기 위해 이용할 수 있는 첨단 기법들이 몇 가지 있다. 모노펄스 레이더가 하나의 예다. 이를 위해서는 송신 신호에 추가적인 인코딩이 필요하며, 이 인코딩 데이터를 기반으로 표적의 높이를 계산할 수 있다. 여기에는 복잡한 램프 프로파일 시스템과 향상된 후처리 알고리즘이 필요하다. 이 글에서는 표적을 2D 도메인에 표시하는 표준 FMCW 레이더 토폴로지를 집중적으로 다룬다.
램프 생성(ramp generation)
앞서 ‘무엇을 탐지하고자 하는가?’ 단락에서 언급했듯이, 표적의 속도에 따라 램프의 속도가 결정된다.
FMCW 스윕을 생성하기 위한 가장 간단한 방법은 주파수 합성기로서 PLL과 VCO를 사용하는 것이다. 어떤 PLL 제품은 내부에 주파수 스위퍼를 포함한다. 이러한 제품은 내부 타이머와 클록을 사용해서 자동으로 PLL N 카운터를 내부적으로 증가시킨다. N 카운터를 증가시키면 램프 프로파일을 생성하는 출력 주파수를 높인다. 특정 애플리케이션에 따라서 정확한 프로파일과 타이밍을 맞춤화할 수 있다. 예를 들어 톱니파나 삼각파를 사용하거나, 또는 램프 지연 간격을 추가할 수 있다.
FMCW 스윕을 생성하는 또 다른 기법은 외부의 파형 생성기를 사용해서 PLL 차지 펌프와 VCO 사이의 전압 튜닝에 이 파형을 얹는 것이다. 이 외에 PLL을 정주파수 셋업으로 사용하고 디지털 직접 합성기(DDS)를 레퍼런스 입력 신호로 사용하는 방법도 있다. DDS는 빠른 주파수 스위칭을 가능하게 하므로, 레퍼런스를 스윕해서 PLL로부터 램프 파형을 생성할 수 있다.
FMCW 레이더 애플리케이션의 경우, FMCW 램프를 구성하는 빠른 주파수 홉 때문에 PLL 동기 시간(lock time)이 매우 중요하다. PLL에 단일 대역 VCO를 결합했을 때 동기 시간에 있어서 가장 큰 비중을 차지하는 요인은 루프 필터의 대역폭이다. 루프 대역폭이 높으면 안정화 시간이 빨라지지만, 대신에 대역내 위상 잡음이 증가한다. 루프 대역폭이 너무 좁으면 주파수 램프가 선형적이지 않을 수 있고, 특히 다운램프에서 그렇다. 과도한 언더슈트가 발생할 수도 있는데, 이는 스펙트럼 방사/적합성 문제로 이어질 수 있다.
빠르게 스윕하는 FMCW의 경우, PLL의 루프 필터 대역폭을 넓게 하는 데 있어서 한계가 있을 수 있다. 경험상으로는 10/PFD 주파수를 넘지 않도록 하는 것이 바람직하다. 실제적으로는 2MHz 이상의 루프 필터 대역폭을 달성하기가 어려울 수 있다. 커패시터 크기를 작게 해야 하고 PCB 차원에서 존재하는 기생 성분들이 필터 설계를 까다롭게 하기 때문이다. 능동형 루프 필터를 사용한다면 연산 증폭기의 이득 대역폭 곱(GBP)을 PFD 주파수보다 최소한 10배 이상 더 높게 하는 것이 원칙이다.
아나로그디바이스(Analog Devices)가 무료로 제공하는 소프트웨어인 ADIsimPLL™을 사용하면 램프 생성기를 포함하는 ADI PLL에 대해 주파수 도메인 성능 분석과 시간 도메인 램프 분석을 실시할 수 있다. “ADIsimPLL을 사용하여 ADF4158로 주파수 램프 시뮬레이션하기”라는 제목의 동영상에서 자세한 내용을 확인할 수 있다.
ADF4159 PLL은 램프 생성 기능을 포함하고 있으며, ADIsimPLL 소프트웨어에 포함되어 있어 이 글의 예제용 램프 생성기로 채택하고 있다. ADF4159의 최대 동작 주파수는 13GHz이다. 그러므로 24GHz ISM 대역을 커버하는 램프를 달성하기 위해서는 PLL 입력에 divide-by-2 출력인 VCO를 연결해야 한다.
송신(Tx) 스테이지
송신 레이더 신호를 효율적으로 전달하기 위해서는 FMCW 램프에 충분한 이득을 제공하고, 안테나와 인터페이스하기 위해서는 송신 스테이지가 필요하다. 앞서 언급했듯이, 레이더의 거리는 송신 신호의 강도와 함수 관계이다.
또한 이전 단락에서 설명한 것처럼 PLL로 위상을 고정하기 위해서 VCO가 필요하다. 송신 스테이지는 개별 소자들로 구현할 수 있는데, 그러면 VCO의 출력을 PLL 피드백과 PA 스테이지로 분할해야 한다. 통합 솔루션으로는 ADF5901 MMIC 송신 IC를 사용할 수 있다. 이 디바이스는 divide-by-2 출력을 제공하는 24GHz~24.25GHz VCO를 내장하고 있으며, ADF4159 PLL과 함께 사용할 수 있다. 또한 ADF5901은 최대 8dBm의 출력 전력을 제공하는 전력 증폭기(PA)를 출력에 포함하고 있다. 이 정도면 100미터 내외의 거리까지 전송하기에 충분하다(RCS = 1m2). 거리를 더 늘리고자 한다면 외부 PA 스테이지를 추가하여 사용하면 된다.
ADF5901은 2개의 송신 출력 채널을 제공한다. 보통의 동작을 위해서는 둘 중 하나만 사용한다. 첨단 MIMO(multiple input multiple output) 동작을 위해서는 두 송신 채널을 번갈아 사용한다(뒷부분의 “그 밖의 기능” 단락 참조).
수신된 레이더 신호의 하향변환을 위해서는 LO 신호가 필요하다. LO 주파수는 매 순간 송신 신호와 정확하게 동일한 주파수여야 한다. 하향변환에 관해서는 “수신 스테이지(Rx)와 하향변환” 부분에서 자세히 설명할 것이다.
수신 스테이지(Rx)와 하향변환
앞에서 살펴보았듯이, 표적의 각 위치를 삼각측량법으로 계산하기 위해서는 한 개 이상의 수신 채널이 필요하다. 또한 앞에서 설명했듯이, 레이더 시스템으로 표적을 탐지할 수 있는 각 오프셋에 있어서 정확도(각 분해능)는 수신 채널 수와 직결된다. 이 글에서 제안하는 레이더 시스템은 수신 스테이지에 ADF5904 수신 MMIC를 채택하고 있다. ADF5904는 4개 수신 채널을 사용해서 웬만한 정도의 각 분해능을 제공한다.
채널 수를 늘리는 한 가지 방법은 수신 IC를 여러 개 사용하는 것이다. 이때는 이들 IC 모두가 동일한 LO 신호를 수신하도록 함으로써 정확한 하향변환을 달성할 수 있다. 만약 2개의 ADF5904 IC를 사용한다면 ADF5901의 LO 출력 전력과 ADF5904의 LO 입력 감도를 감안할 때 윌킨슨 분배기(Wilkinson divider) 같은 수동형 스플리터로 충분하다. 2개 이상의 ADF5904 IC를 사용해서 수신 채널을 더 늘리고자 한다면, LO 출력에 PA(HMC863ALC4 같은)의 형태로 약간의 이득이 필요할 것이다.
수신 채널 수가 많을수록 더 높은 성능의 레이더 구현이 가능하지만, 그 대신 데이터 부하가 늘어나며, 이는 다시 더 높은 프로세싱 능력을 필요로 한다. 이미징 레이더에 많은 수신 채널을 사용하면 실시간 프로세싱을 위해서 고가의 FPGA 솔루션과 복잡한 펌웨어 루틴이 필요할 것이다. 하지만 채널 수를 제한하면 프로세싱과 데이터 전송을 위해서 상대적으로 저렴한 DSP를 사용할 수 있다. 따라서 이 글에서는 4개의 수신 채널을 제공하는 ADF5904 한 개를 사용하는 방안을 예로 들어서 설명하고 있다. 유효 수신 채널을 늘리는 또 다른 방법은 이 글에서 선택하고 있는 2채널 송신 구성으로 MIMO 동작을 사용하는 것이다.
표적으로부터 반사되는 신호의 세기는 송신 신호 세기의 일부에 불과하다. 그러므로 통상적으로 LNA를 사용해서 수신 신호를 증폭한다. 낮은 반사 신호 세기와 관련한 또 다른 고려사항은, 수신 스테이지의 잡음 지수(NF)와 결과적인 출력 잡음이 최소 탐지 신호(minimum detectable signal, MDS)에 영향을 미치고 시스템의 최대 거리를 제한할 수 있다는 것이다.
요구되는 신호대 잡음비(SNR)에 따라서, NF가 나쁘면 표적을 탐지하지 못할 수도 있다. 일반적인 통신 시스템은 통상적으로 3dB의 SNR을 목표로 한다. 레이더 시스템은 그 정도는 아니고 통상적인 최소 SNR이 10~15dB이다. 정확한 SNR 요구 사항은 애플리케이션마다 다를 수 있다. 모든 표적들을 최대한 놓치지 않고 감지하는 것이 중요한 애플리케이션은 이보다 낮은 최소 SNR을 요구할 것이다. 반면에 표적의 오탐지를 최소화하는 것이 중요한 애플리케이션이라면 좀더 높은 SNR이 나은 방법이다. ADF5904는 잡음 지수가 10dBm인데, 이는 1MHz 베이스밴드 대역폭과 10dB의 SNR일 때 약 -94dB의 MDS에 해당한다.
FMCW 레이더 하향변환을 위해서는 수신 신호를 송신 신호와 비교해야 한다. 이 사례의 경우에는 송신 신호에 해당하는 것이 LO 신호이다. LO는 믹서로 피드되고 수신 신호는 하향변환된다. FMCW 레이더에서 흔히 사용되는 믹서 토폴로지는 ‘호모다인(homodyne)’ 또는 ‘zero-IF 믹서’라고 불리는 직접 변환 방식이다. ADF5904는 직접 변환 믹서를 포함한다. 이 믹서의 출력은 IQ가 아닌 실제 데이터이다. 일련의 고속 푸리에 변환(FFT) 분석을 실시해서 위상을 검출하고 표적 속도를 도출할 수 있다(TinyRad에 사용되는 데이터 형식에 관해서는 “새롭게 떠오르는 산업용 대량 시장을 위한 혁신적인 비접촉 센서를 가능케 하는 24GHz Demorad 레이더 솔루션” 기사 참조).
ADC와 샘플링
FMCW 데이터를 처리하고 유용한 표적 정보를 도출하기 위해서는 먼저 하향변환 베이스밴드 파형을 각각 아날로그 프런트 엔드(AFE)와 ADC를 사용해서 필터링하고 샘플링해야 한다. 어떠한 ADC를 선택할 것인지는 채널 수, 동적 범위, SNR, 각 채널의 동시 샘플링 능력, 견고한 필터링 옵션 등 ADC와 관련해서 일반적으로 고려해야 하는 특성들 외에도, 레이더가 고속으로 움직이는 여러 개의 표적들을 검출할 수 있도록 빠른 FMCW 램프를 사용할 것인지 또는 느린 램프로도 충분한 활용 사례인지에 따라서 달라질 것이다.
이 글에서 선택하고 있는 ADF5904 수신 IC는 최대 10MHz의 복조 대역폭을 지원하므로, 이 글에서 제안하는 레이더 시스템은 저속과 고속 FMCW 램프를 모두 지원할 수 있다.
저속 램프는 베이스밴드 대역폭이 500kHz 대로 낮지만, 고속 FMCW 램프는 대역폭이 10MHz 혹은 그 이상에 이르는 베이스밴드 신호를 지원하기 위해서 고속 신호 체인을 필요로 할 것이다.
ADAR7251은 ADF5904에 곧바로 인터페이스하도록 설계되었으며, 따라서 낮은 잡음과 동적 범위 특성 때문에 느린 FMCW 램프에 사용하기에 적합하다.
빠르게 움직이는 표적들을 탐지해야 하는 애플리케이션의 경우, 또 다른 옵션으로서 AD8285를 사용할 수 있다. AD8285는 최대 12MHz의 더 넓은 입력 대역폭을 지원하고 더 빠른 샘플 레이트가 가능한 대신에, ADAR7251에 비해 잡음 성능, 이득, 필터링 옵션, 분해능 특성이 약간 떨어질 수 있다.
빠른 FMCW 램프에서 데이터 부하가 증가하면 늘어난 데이터를 처리하기 위해서 FPGA가 필요할 수 있는 반면, 좀더 느린 속도의 램프는 프로세싱과 데이터 전송을 위해서 전력 소모가 더 적고 비용도 더 저렴한 DSP를 사용할 수 있다. 이 글에서 제안하고 있는 시스템은 성능과 비용이 균형을 이루는 것을 목표로 하고 있으며, 이 점에서 ADC로서 ADAR7251을 선택하고 있다.
안테나 설계
안테나 설계는 매우 복잡한 주제이며 이 글의 범위를 벗어난다. 각 위치를 정확히 계산하기 위해서는 수신 소자들이 0.5λ 이상 떨어지지 않아야 한다. 이러한 설계에는 송신 채널과 수신 채널 각각에 똑같은 중앙 급전식 패치 안테나를 사용한ADI다. 송신 채널은 MIMO 동작을 위해 0.5λ 이상 떨어트려야 한다. MIMO 기법에 관해서는 다음 단락에서 자세히 설명하겠지만, 가상 어레이가 동작하도록 하기 위해서는 각 안테나 사이의 거리를 캘리브레이션하고 저장해야 한다.
그 밖의 기능
이 글에서는 MIMO 기술이 몇 차례 언급되었다. MIMO 기법을 사용하면 레이더의 유효 수신 채널 수를 늘릴 수 있으며, 그럼으로써 각 분해능을 높일 수 있다.
MIMO 동작이 아닌 경우, 오직 한 개의 송신 채널만 사용하며, 4개의 수신 채널과 짝을 이루었을 때 앞서 소개한 안테나 구성일 경우 각 분해능이 약 30°이다.
이 레이더에 MIMO 모드를 적용하면 송신 신호는 하나의 송신 채널(Tx1)을 통해 전송되고 그 다음 레이더 첩(chirp)이나 램프가 다른 송신 채널(Tx2)로 전송된다. 이렇게 송신 채널이 분리됨에 따라 송신 신호가 Tx2와 Tx1으로부터 전송되었을 때 수신단에서의 도달 각도(AoA)에 오프셋이 발생한다. 각 소자들 사이의 간격을 구하여 저장하고 캘리브레이션하면 이 오프셋을 사용해서 추가적인 가상 안테나 소자들을 생성할 수 있다.
따라서 MIMO 모드일 때는 이 레이더에 실질적으로는 7개의 수신 소자를 사용하는 셈이다. 4개는 실제 물리적 소자이고, 4개는 Tx2로 나타나는 오프셋 가상 소자들이다. 이 때, 가운데 위치한 소자는 하나의 실제 소자와 가상 소자가 중첩된 것이므로 총 7개의 수신 소자가 되는 것이다. 이 설계 예시에 MIMO 동작을 사용하면 각 분해능은 20° 이하로 향상된다.
그림 3. 위의 그림은 물리적 안테나 위치와 간격을 나타낸 것이고, 아래는 MIMO 동작을 사용할 때 소자들이 가상적으로 어떻게 생성되는지 보여준다.
맺음말
이 글에서는 FMCW 레이더를 구현하는 데 있어서 시스템 차원에서 필요로 하는 빌딩 블록들을 살펴보았다. 동작 주파수는 ISM 대역인 24GHz를 목표로 했다. 실시간 데이터 분석을 쉽게 하고자 저속의 FMCW 램프에 좀더 느린 속도의 샘플링 신호 체인과 낮은 데이터 속도를 사용했다.
ADI의 24GHz 칩셋은 우수한 통합 수준과 뛰어난 성능 덕분에, 전적으로 개별 부품들을 사용하는 솔루션에 비해 레이더 설계를 간소화하도록 한다. ADI의 TinyRad 플랫폼은 사전에 구현된 평가 플랫폼으로서, 이 칩셋을 기반으로 하고 필요한 소프트웨어를 포함하므로 사용자는 평가 작업을 쉽고 빠르게 할 수 있으며 하드웨어를 처음부터 일일이 개발해야 할 때 드는 시간도 단축할 수 있다. TinyRad의 성능과 동작에 관한 상세 정보는 ADI 웹사이트 해당 제품 페이지의 사용자 가이드에서 확인할 수 있다.
그림 4. EV-TINYRAD24G는 신용카드 크기의 보드에서 완전한 FMCW 레이더 시스템을 제공한다. 위쪽 그림에서는 상단면에 ADI의 24GHz 칩셋이 탑재된 것을 볼 수 있다. 아래 그림에서는 송신 및 수신 중앙 급전식 패치 안테나를 볼 수 있다.
그림 4. EV-TINYRAD24G는 신용카드 크기의 보드에서 완전한 FMCW 레이더 시스템을 제공한다. 위쪽 그림에서는 상단면에 ADI의 24GHz 칩셋이 탑재된 것을 볼 수 있다. 아래 그림에서는 송신 및 수신 중앙 급전식 패치 안테나를 볼 수 있다.
TinyRad는 다양한 애플리케이션에 우수한 성능을 제공하며, 특히 초보 레이더 설계 엔지니어들에게 유용한 솔루션을 제공한다. 다만 빠르게 움직이는 표적을 탐지해야 하거나(표적 크기에 따라서 다를 수 있으나) 거리가 200미터 이상인 경우와 같이 까다로운 활용 사례에는 성능이 불충분할 수 있다.
그러므로 구체적인 활용 사례에 따라서 TinyRad 설계를 좀더 맞춤화할 수 있는 방법들을 제시하고 있다. EV-RADAR-MMIC는 커넥터형 평가 보드로서, TinyRad의 플러그-앤-플레이 기능들은 줄어든 대신에 송신 및 수신 채널에 외부 ADC, 프로세서, 추가적인 이득 스테이지를 연결할 수 있으므로 추가적인 맞춤화가 가능하다.
저자 소개
알렉스 앤드류스(Alex Andrews)는 2017년에 아나로그디바이스(Analog Devices)에 입사했으며, 퀸즈 대학 - 벨파스트에서 전기전자공학 학사학위를 취득했다. ADI 입사 후 아일랜드 리머릭에 거주하면서 브로드 마켓 주파수 생성 그룹의 애플리케이션 엔지니어로서 위상 동기 루프(PLL) 및 24GHz 레이더 제품을 주로 담당하고 있다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>
본 기사의 전문은 PDF문서로 제공합니다.
(로그인필요)
다운로드한 PDF문서를 웹사이트, 카페, 블로그등을 통해 재배포하는 것을 금합니다. (비상업적 용도 포함)
다운로드한 PDF문서를 웹사이트, 카페, 블로그등을 통해 재배포하는 것을 금합니다. (비상업적 용도 포함)
100자평 쓰기