[개발] 일반 영상만으로 고품질 3D 장면 복원한다
2025-11-06 신윤오 기자, yoshin@elec4.co.kr
KAIST 전산학부 윤성의 교수 연구팀, ‘SHARE’ 개발
기존의 3D 시뮬레이션은 실제 공간을 라이다(LiDAR)나 3D 스캐너로 정밀하게 측정하고, 수천 장의 사진을 카메라 위치 정보와 함께 보정해야 하는 번거로운 과정을 거쳐야 했다. KAIST 연구진은 이러한 한계를 극복하고 단 2~3장의 일반 사진만으로도 실험실이나 도심을 고정밀 3D 공간으로 복원해 시뮬레이션 환경을 구축할 수 있는 기술을 선보였다고 밝혔다. 이로써 ‘현실을 찍으면 곧바로 가상 환경이 되는’새로운 패러다임을 제시했다.
KAIST(총장 이광형)는 전산학부 윤성의 교수 연구팀이 정밀한 카메라 위치 정보 없이도 일반 영상만으로 고품질의 3차원 장면을 복원할 수 있는 새로운 기술 ‘SHARE(Shape-Ray Estimation)’를 개발했다고 11월 6일 밝혔다.

기존의 3D 복원 기술은 소수의 영상으로 3차원 장면을 재현하기 위해 촬영 당시의 정밀한 카메라 위치와 방향 정보가 필수적으로 요구되어, 고가의 특수 장비나 복잡한 보정 과정이 필요하다는 한계가 있었다. 이러한 제약 때문에 실제 환경에서의 적용이 어렵고, 대중적 활용에도 제동이 걸려왔다.
연구팀은 이러한 문제를 해결하기 위해, 단 2~3장의 일반 사진만으로도 3차원 장면과 카메라의 방향을 동시에 추정해 정확한 3D 모델을 구축하는 기술을 개발했다. 별도의 추가 학습이나 정밀한 보정 과정 없이도 실제 환경에서 신속하고 정밀한 복원이 가능해 효율성과 범용성이 매우 높은 기술로 평가받고 있다.
핵심 기술인 SHARE는 영상 속에서 사물의 형태(Shape)와 카메라의 시선 방향(Ray)을 동시에 추정하는 새로운 방식을 도입했다.
기존 방식이 카메라 위치를 미리 알아야 3D 구조를 계산할 수 있었다면, SHARE는 영상 자체에서 공간 정보를 스스로 찾아내어 카메라와 구조를 추론한다. 이를 통해 서로 다른 위치에서 촬영된 다중 영상을 하나의 공통된 공간으로 정렬하고, 형상 왜곡 없이 안정적인 3D 복원을 실현했다.
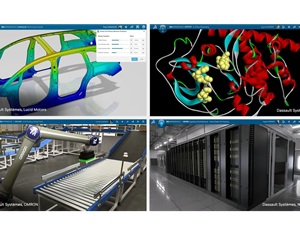
윤성의 교수는 “SHARE 기술은 3D 복원의 진입 장벽을 획기적으로 낮춘 기술로, 건설·미디어·게임 등 다양한 산업에서 스마트폰 카메라만으로도 고품질 콘텐츠 제작을 가능하게 할 것”이라며 “로봇과 자율주행 분야에서도 저비용 시뮬레이션 환경 구축 등 다양한 응용 가능성이 있다”고 밝혔다.
이번 연구는 나영주 박사과정, 김태연 석사과정 학생이 공동 제1저자로 참여했으며, 연구 결과는 국제 이미지 처리 학회(IEEE International Conference on Image Processing, ICIP 2025)에서 9월 17일 발표되어 ‘최고 학생논문상(Best Student Paper Award)’을 수상했다.
이 상은 올해 채택된 643편의 논문 중 단 한 편에게만 수여되는 영예(수상률 0.16%)로, KAIST 연구진의 우수한 연구역량을 다시 한 번 입증했다.
이번 성과는 과학기술정보통신부 SW스타랩 사업 ‘오픈 월드 로봇 서비스를 위한 불특정 환경 인지·행동·상호작용 알고리즘 개발’ 과제지원으로 수행되었다.
기존의 3D 시뮬레이션은 실제 공간을 라이다(LiDAR)나 3D 스캐너로 정밀하게 측정하고, 수천 장의 사진을 카메라 위치 정보와 함께 보정해야 하는 번거로운 과정을 거쳐야 했다. KAIST 연구진은 이러한 한계를 극복하고 단 2~3장의 일반 사진만으로도 실험실이나 도심을 고정밀 3D 공간으로 복원해 시뮬레이션 환경을 구축할 수 있는 기술을 선보였다고 밝혔다. 이로써 ‘현실을 찍으면 곧바로 가상 환경이 되는’새로운 패러다임을 제시했다.
KAIST(총장 이광형)는 전산학부 윤성의 교수 연구팀이 정밀한 카메라 위치 정보 없이도 일반 영상만으로 고품질의 3차원 장면을 복원할 수 있는 새로운 기술 ‘SHARE(Shape-Ray Estimation)’를 개발했다고 11월 6일 밝혔다.
기존의 3D 복원 기술은 소수의 영상으로 3차원 장면을 재현하기 위해 촬영 당시의 정밀한 카메라 위치와 방향 정보가 필수적으로 요구되어, 고가의 특수 장비나 복잡한 보정 과정이 필요하다는 한계가 있었다. 이러한 제약 때문에 실제 환경에서의 적용이 어렵고, 대중적 활용에도 제동이 걸려왔다.
연구팀은 이러한 문제를 해결하기 위해, 단 2~3장의 일반 사진만으로도 3차원 장면과 카메라의 방향을 동시에 추정해 정확한 3D 모델을 구축하는 기술을 개발했다. 별도의 추가 학습이나 정밀한 보정 과정 없이도 실제 환경에서 신속하고 정밀한 복원이 가능해 효율성과 범용성이 매우 높은 기술로 평가받고 있다.
핵심 기술인 SHARE는 영상 속에서 사물의 형태(Shape)와 카메라의 시선 방향(Ray)을 동시에 추정하는 새로운 방식을 도입했다.
기존 방식이 카메라 위치를 미리 알아야 3D 구조를 계산할 수 있었다면, SHARE는 영상 자체에서 공간 정보를 스스로 찾아내어 카메라와 구조를 추론한다. 이를 통해 서로 다른 위치에서 촬영된 다중 영상을 하나의 공통된 공간으로 정렬하고, 형상 왜곡 없이 안정적인 3D 복원을 실현했다.
윤성의 교수는 “SHARE 기술은 3D 복원의 진입 장벽을 획기적으로 낮춘 기술로, 건설·미디어·게임 등 다양한 산업에서 스마트폰 카메라만으로도 고품질 콘텐츠 제작을 가능하게 할 것”이라며 “로봇과 자율주행 분야에서도 저비용 시뮬레이션 환경 구축 등 다양한 응용 가능성이 있다”고 밝혔다.
이번 연구는 나영주 박사과정, 김태연 석사과정 학생이 공동 제1저자로 참여했으며, 연구 결과는 국제 이미지 처리 학회(IEEE International Conference on Image Processing, ICIP 2025)에서 9월 17일 발표되어 ‘최고 학생논문상(Best Student Paper Award)’을 수상했다.
이 상은 올해 채택된 643편의 논문 중 단 한 편에게만 수여되는 영예(수상률 0.16%)로, KAIST 연구진의 우수한 연구역량을 다시 한 번 입증했다.
이번 성과는 과학기술정보통신부 SW스타랩 사업 ‘오픈 월드 로봇 서비스를 위한 불특정 환경 인지·행동·상호작용 알고리즘 개발’ 과제지원으로 수행되었다.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>
100자평 쓰기