.jpg)
기술 개요
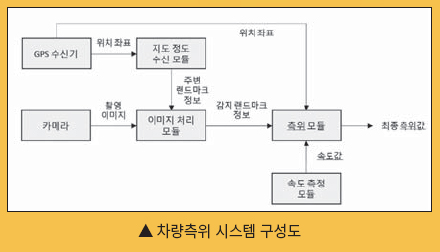
GPS와 지도 정보 기반 랜드마크와의 거리 정보와 차선 정보를 결합하여 차량의 정확한 위치를 산출하는 차량 측위 시스템
① 이미지 프로세싱 통한 랜드마크 정보 추출 범위 파악 : GPS로 계산된 좌표값을 기준으로 하여 차량 주변의 랜드마크 좌표 정보인 로컬 다이나믹 맵(LDM) 다운로드
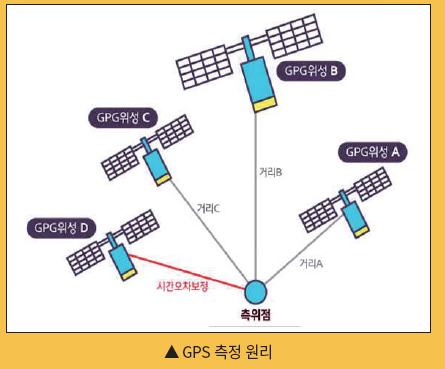
차량 카메라를 이용하여 랜드마크와 차량 사이의 거리와 각도 정보를 추출하여 위치 추정 GPS는 위성에서 송신된 신호와 수신기에서 수신된 신호의 시간차를 측정하여 위성과 수신기 사이의 거리를 계산하여 제공
② 랜드마크 추출 정보 범위에 따른 차량 측위 : 이미지 프로세싱을 통해 위치 추정이 어려운 경우, 카메라의 최대 감지 거리와 현재 감지된 랜드마크 위치 정보를 계산하여 차량의 위치 측위 가능
랜드마크 추출 정보가 다른 경우, 각각의 랜드마크 정보의 종류에 따라 좌표를 계산 및 융합하여 최종 차량 위치를 산출
기술적인 이슈
기존 GPS(Global Positioning System)을 이용하여 위치 측정을 하는 경우, 오차범위가 5~15m로 정밀한 위치 측정이 필요한 차량안전기술에 적용하는데 한계 존재
GPS 위성 신호는 상대적으로 느린 속도로 전송하므로 빌딩 및 터널이나 다중 경로를 형성하는 경우에 오류 발생 가능성 증가
기존 관성 항법 시스템(Inertial Navigation System, INS)은 차량 센서를 결합하여 상대적인 차량의 위치를 측정하는 장치로 시간에 따라 센서의 오차가 누적되는 단점 존재
차별성 및 특, 장점
지도 정보를 이용하여 차량의 위치를 측정하여 GPS의 측위 오차 개선
차량에 설치된 카메라를 차량 측위 시스템으로 활용하여 기존 관성 항법 시스템보다 더 적은 하드웨어를 사용하여 차량무게 감소로 연비 절감 가능
기존 관성 항법 시스템은 차량의 주행계, 스티어링 휠 인코더, 가속도계, 자이로스코프 등 차량 센서를 사용하여 고가이나, 본 기술은 차량 카메라와 차량용 센서를 활용하므로 저가에 차량 측위 가능
.jpg)
GPS와 관성 항법 시스템을 결합하여 GPS의 음영 지역에서의 위치를 추정하고, 관성 항법 시스템의 누적 오차 보정 가능
감지된 랜드마크와 차량 사이의 거리 정보와 각도 정보를 추출하여 차량 위치 산출
랜드마크를 통한 위치 정보를 추출할 수 없는 경우, 카메라 감지 최대 각도와 차량의 속도를 측정하여 가상의 랜드마크를 가정해 위치 추정
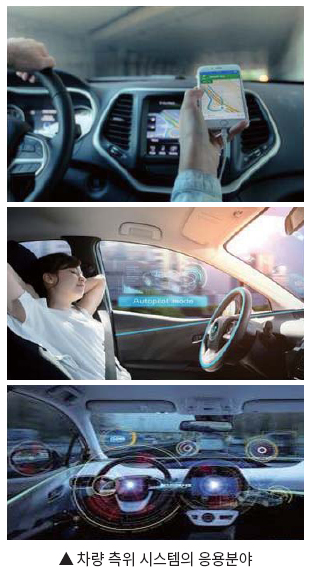
응용분야
빌딩이나 터널 등 GPS 수신이 어려운 음영지역에서의 차량 위치를 추정하여 전송할 수 있으므로 재난 현장에서 활용 가능한 내비게이션 시스템 분야에 응용
신속하고 정확하게 차량의 위치를 측정해야 하는 자율주행자동차 분야에 응용
시장성
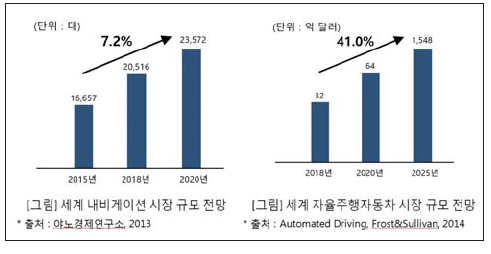
세계 내비게이션 시장 규모는 2015년 16,657대 규모에서 연평균 7.2% 성장하여 2020년에는 23,572대 규모 전망
세계 자율주행자동차 시장 규모는 2018년 32억 달러 규모에서 연평균 41.0% 성장하여 2025년 1,548억 달러 규모 전망
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>