.jpg)
기술 개요
본 기술은 로봇 자중 및 기반 하중에 의한 중력 토크를 기계적으로 보상하여, 자세 유지 및 동작에 필요한 토크를 최소화 시키는 기술과 충돌 안전 및 쉬운 교시(No Programming) 기술을 포함한 중력보상 협동로봇 기술로 동일한 공간에서 협동으로 작업을 수행하여 작업효율성을 극대화 시킴
① 기계식 중력보상 기술: 로봇에 설치된 스프링 및 간단한 기구의 조합에 기반하여, 중력 토크를 기계적으로 적절히 보상함으로써, 모터와 센서의 도움 없이 3차원 공간에서 기구의 자세 유지에 필요한 토크를 제로화 또는 최소화 가능
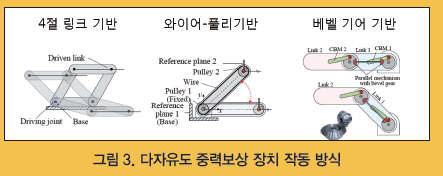
② 다자유도 중력보상 기술: 직렬로봇의 모든 중력 관절에 동시에 중력 토크를 기계식으로 보상할 수 있는 기술
3차원상 로봇이 어떤 자세를 취하여도, 각 링크별 중력보상을 위한 기준면을 유지할 수 있도록 기계적으로 조절
③ 충돌안전 기술: 비접촉식 충돌 예측, 충돌 감지 및 대응, 순수한 기계장치로 충돌 대응 등 안전 문제가 해결되어, 동일 공간에서 작업자와 로봇이 같은 작업을 수행 가능
④ 쉬운 교시 기술: 직관적인 핸드 가이딩을 통하여 작업자가 로봇의 말단부를 손으로 잡고, 원하는 작업경로로 움직임으로써, 프로그래밍 없이 작업 지시 가능
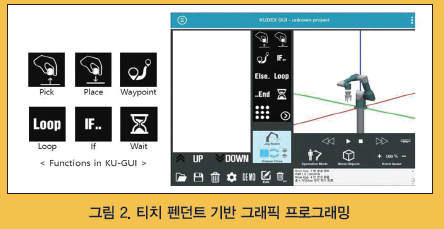
티치 펜던트 기반으로 필요 아이콘을 드래그&드롭 방식으로 연결해 나가면 로봇의 작업 교시가 가능해지는 그래픽 프로그래밍 제공
기술적인 이슈
기존 산업용 로봇은 안전규정에 따라 로봇용 독립공간이 필요하고, 로봇 및 작업자 영역 분리로 인하여 작업공간 사용의 비효율성이 발생
안전펜스 구성 필요없이 작업자와 로봇이 작업공간을 공유하며 협동 작업이 가능한 협동 로봇에 수요가 증가하면서, 작업공간 안전을 제공하기 위해 충돌 예측, 충돌 감지 등 충돌 안전 기술 필요
.jpg)
차별성 및 특, 장점
본 기술의 중력보상 장치는 기구의 자중 등으로 인한 토크를 스프링 및 기구의 조합에 기반하여, 기계적으로 적절히 보상함으로써, 3차원상 기구의 자세 유지 및 동작에 필요한 토크를 최소화
기존의 무게 추 기반의 중력보상 방식이 아닌 스프링 기반의 중력보상장치 방식을 채택하여, 서비스 로봇이나 소형 로봇에 적용 가능
4절 링크 기반, 와이어-풀리 기반, 베벨 기어 기반 등 다자유도 중력보상 장치는 하나의 관절 뿐만 아니라 모든 관절에 기계적으로 동시에 중력보상 가능
경량화 설계, 기계식 중력 보상으로 로봇의 연속 운영 시 기존 대비 에너지 효율 30% 향상
티치 펜던트 기반의 그래픽 프로그래밍 방식으로 로봇에 대한 사전 지식이나 경험이 없어도 로봇 작업을 직관적으로 처리하거나 실행 전에 로봇 궤적을 검증할 수 있음
모델 기반 토크제어를 수행하여, 위치제어, 충돌감지, 직접교시, 힘제어 뿐만 아니라 임피던스 제어 및 어드미턴스 제어 기능도 제공
.jpg)
.jpg)
.jpg)
응용분야
자동차 및 가전 조립 등 대기업 제조 현장 뿐만 아니라 로봇 엔지니어가 없고, 공장이 협소한 중소기업 제조 현장에서도 응용 가능
의료분야에서 이용되는 협동로봇의 경우 로봇 관절에 부착된 고정밀 토크 센서와 섬세한 힘조절을 바탕으로 높은 안정성을 구현하여 초음파 검사, 내시경수술 등과 같은 기능을 수행
시장성
세계 협동로봇 시장 규모는 2014년 660억원 규모에서 연평균 65.0% 성장률로 2020년에는 36,060억원 규모 전망
국내 협동로봇 시장 규모는 2014년 31억원 규모에서 연평균 66.0% 성장하여 2020년 1,773억 원 규모 전망
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>