100Mbps 자동차 이더넷 표준
.jpg) 100BASE-T1은 차량 네트워킹이 필요로 하는 바를 충족하고 있는 최초의 자동차 고유 이더넷 표준이다. 이것은 10BASE-T, 100BASE-TX, 1000BASE-T에서 배운 교훈을 바탕으로 구축된 것으로 엄격한 자동차 방출 요건, 케이블링 무게, 비용, 풋프린트 크기 등을 충족하고 있다.
100BASE-T1은 차량 네트워킹이 필요로 하는 바를 충족하고 있는 최초의 자동차 고유 이더넷 표준이다. 이것은 10BASE-T, 100BASE-TX, 1000BASE-T에서 배운 교훈을 바탕으로 구축된 것으로 엄격한 자동차 방출 요건, 케이블링 무게, 비용, 풋프린트 크기 등을 충족하고 있다.
자동차 전기 시스템은 차량에 구현된 전자제어장치(ECU)의 수가 증가함에 따라 점점 더 끊임없이 복잡해지고 있다. 이러한 ECU는 매우 광범위하게 실시간 데이터를 공유하기 때문에 네트워크 대역폭에 대한 수요를 증가시킨다.
자동차 회사들은 이러한 대역폭 문제를 해결하기 위해 주요 집적회로(IC) 제조사 및 시스템 개발자들과 협력하여 자동차 통신 네트워크 맞춤형으로 완전히 새로운 이더넷 표준을 수립하였다.
IEEE 802.3bw(Institute of Electrical and Electronic Engineers) 표준 (100BASE-T1라고도 함, 이전 명칭은 BroadR-Reach)은 자동차 네트워킹에서 데이터 처리량을 늘리고 강력한 자동차 배출 가스 표준을 충족하고 케이블링 무게 및 비용을 절감하기 위한 100Mbps 자동차 이더넷 표준이다. 기본적인 중첩 원리들과 특정 인코딩 및 스크램블링 도식을 이용하고 있는 100BASE-T1은 이더넷 표준 10BASE-T 와 100BASE-TX에 비해 EMI(electromagnetic interference)와 케이블링 무게, 비용, 풋프린트 크기를 줄여준다.
수 년에 걸쳐 자동차 전기 시스템이 점점 더 복잡해진 것은 인포테인먼트와 ADAS (advanced driver assistance systems), 파워 트레인, 차체 전자 장비가 발전한 데 주로 기인한다. 이러한 시스템들에 더 빠른 통신 네트워크가 필요한 이유는 오늘날의 차량에서 다양한 ECU들간에 공유되는 방대한 양의 실시간 데이터와 펌웨어/소프트웨어 때문이다.
IEEE 802.3bw(100BASE-T1)는 자동차 회사들이 주요 집적회로(IC) 제조사 및 시스템 개발자들과 함께 개발한 새로운 물리 레이어(PHY) 통신 프로토콜이다.
100BASE-T1은 비차폐 싱글 연선 케이블의 100Mbps 통신 속도에서 더 넓은 대역폭 수요에 적합한 솔루션이다. (몇몇 패시브 컴포넌트들과 함께) 중첩, 인코딩, 스크램블링 도식을 이용하고 있는 100BASE-T1은 기존 패스트 이더넷(100BASETX) 솔루션에 비해 EMI와 케이블링 무게, 비용, 풋프린트 크기를 줄여준다. 이 글의 목적은 자동차 네트워크의 데이터 유형에 맞춰 자동차 시스템에서 볼 수 있는 100BASE-T1의 여러 가지 용례들을 알아보고, 이 물리 레이어가 과거 이더넷 표준들에 비해 어떤 자동차 검정필 네트워크를 만들어내는지 소개하는데 있다.
자동차에서의 이더넷
이더넷은 상업용 및 산업용으로 오랫동안 인기를 얻고 있는 통신 프로토콜이긴 하지만, 자동차 산업에서는 100BASE-T1이 등장하기 전까지는 그리 널리 활용되지는 못했다. 일부 차량들은 OBD(onboard diagnostic) 스캔 툴에 100BASE-TX를 사용하기도 한다. 그렇지만 100BASE-TX가 자동차 에코시스템 내에서 성장하지 못했던 이유는 두 개의 연선 케이블이 필요하고 엄격한 CISPR(Comite International Special des Perturbations Radioelectriques) 25 Class 5 방사성 방출 한도를 충족하지 못하기 때문이다
[1].
100BASE-T1는 자동차 시스템이 필요로 하는 바를 충족하기 위해 개발되었다. 이것은 비차폐 싱글 연선 케이블만 있으면 15 m 이상의 통신 거리에서 100Mbps 속도로 데이터를 송수신할 수 있다. 100BASE-T1 방출 프로파일은 CISPR 25 Class 5 Annex G 스트립 선로 방식과, 오픈 얼라이언스(Open Alliance)의 TC8 같은 그 밖의 자동차 방출 표준들을 벗어나지 않는다
[1], [2], [3].
100BASE-T1은 네트워크 아키텍처에 맞춰 차량 내 에코시스템을 표준화하고 ECU들간의 전체 통신을 단순화하여 MOST(Media Oriented Systems Transport)나 FlexRay 같은 오래된 프로토콜이나 덜 일반적인 프로토콜들을 필요 없게 만든다.
100BASE-T1은 비차폐 싱글 연선 케이블의 AVB (audio video bridging) 컬렉션을 이용해 차량 내에서 오디오, 비디오, 커넥티드 카, 펌웨어/소프트웨어, 캘리브레이션 등 데이터의 통신을 가능하게 해준다. IEEE Time-Sensitive Networking Task Group이 개발한 AVB 표준 컬렉션은 결정론적이면서 레이턴시가 낮은 동기화된 노드와 트래픽 쉐이핑을 가지고 있다
[1], [4].
이러한 요소들은 자동차 시스템에서 여러 정보 유형들을 통신하는데 중요한 요소들로, 100BASE-T1 이 서로 다른 유형의 데이터를 다양한 우선순위로 운반할 수 있게 해준다(낮은 데이터 레이트와 높은 우선순위, 높은 데이터 레이트와 낮은 우선순위, 시간 동기화 등).
오디오 및 비디오 데이터를 위한 이더넷
AVB와 짝을 이룬 100BASE-T1은 오디오 데이터와 비디오 데이터를 둘 다 전송할 수 있다. 그렇게 하면 인포테인먼트와 ADAS 영역에서 이더넷의 가능성이 생긴다. AVB는 오디오 및 비디오 데이터에만 특정한 양의 대역폭을 지정한다. 분할된 대역폭 양은 조절이 가능하며 OEM 회사가 선택한다. 일반적으로 오디오 및 비디오 스트림에는 75Mbps의 대역폭이 할당되고, 나머지 25Mbps는 데이터 스트림에 할당된다
[4].
.jpg)
표 1은 방정식 1을 이용해 두 개 채널의 샘플링 레이트와 비트 심도에 따라 오디오에 필요한 대역폭을 보여주고 있다.
표 1을 기준으로, 100BASE-T1은 샘플 당 32bit의 비트 심도에서 44.1kHz와 48kHz, 심지어 96kHz까지 샘플링 오디오의 대역폭 요건을 쉽게 지원한다. 예를 들어, 일반적인 CD는 44.1kHz로 샘플링 되고 심도 깊이는 샘플 당 16bit이다. 고해상 오디오는 샘플 당 24bit에서 96kHz로 샘플링 되는 경우가 많다. 100BASE-T1 링크는 이 둘을 온전히 지원한다.
반면, 비디오 전송에는 훨씬 더 많은 대역폭이 필요하다. 표 2는 몇 가지 비디오 포맷들과 그들 각각에 필요한 대역폭들을 보여주고 있다. 또한 표 2는 여러 미디어 포맷들과 해상도, 프레임 속도에 필요한 비디오 대역폭의 양을 측정해주고 있다.
.jpg)
표 2의 데이터에 따르면, 75Mbps 대역폭의 AVB와 짝을 이룬 100BASE-T1은 인포테인먼트 영역에서 한 쌍의 비디오 채널들을 처리할 수 있다. ADAS 애플리케이션에서 카메라의 비압축 비디오 데이터는 여전히 1 Gbps 이상의 대역폭을 필요로 할 수 있다[8]. 전송 전에 이 비디오를 압축하지 않는 한, 100BASE-T1은 부적합할 수 있다.
또한 이더넷을 통해 전송되는 비디오에는 마이크로컨트롤러(MCU)가 있어야 비디오 압축을 실행할 수 있고 이더넷 통신을 위한 MAC (Media Access Control) 레이어를 제공할 수 있다. 카메라는 수 기가비트의 비압축 데이터를 메인 컴퓨팅 장치에 공급하기 때문에, 100BASE-T1은 적합한 솔루션은 아니지만 카메라 내에 MCU가 집적되면(예컨대 스마트 백업 카메라), 100BASE-T1도 실행 가능한 방식이 될 수 있다.
커넥티드 카 애플리케이션
100BASE-T1이 AVB 애플리케이션에만 한정되는 것은 아니다. 차량 내 핵심 연결이 텔레매틱스 제어 장치(TCU)인데, 이것은 차량의 무선 트랙킹과 차량 송수신 통신을 제어한다. TCU에서 자동차 게이트웨이 (그림 1: 차량 내 여러 통신 도메인들을 서로 연결)로 가는 통신은 클라우드 접근을 가능하게 해주어 여러 ECU들에서 무선으로 소프트웨어/펌웨어 업데이트를 가능 하게한다.
.jpg)
100BASE-T1에서 생각해볼 만한 중요한 점은, TCU에 구현된 일부 자동차 4G LTE 모뎀들이 300-400Mbps에서 동작할 수 있다는 것이다. 그래서 1000BASE-T1과 멀티기가비트 솔루션은 필연적이다.
펌웨어/소프트웨어 및 캘리브레이션 데이터
펌웨어/소프트웨어 업데이트 및 캘리브레이션은 100BASE-T1 이더넷을 사용할 때 더 빨라지며, 자동차 업데이트의 다운타임을 줄여준다. 대부분의 차량들은 진단 데이터를 읽고 소프트웨어/펌웨어를 업데이트 하거나 플래싱하기 위한 100BASE-TX OBD 포트를 가지고 있다.
100BASE-T1를 통해 여러 ECU들을 OBD 포트를 가진 중앙 게이트웨이로 연결하면, 여러 가지 통신 버스들을 이용한 기존 솔루션들보다 더 빨리 업데이트를 할 수 있다. CAN (Controller Area Network)은 1 Mbps에서 동작하고, CAN-FD (CAN Flexible Data-Rate)는 2Mbps 이상에서, FlexRay는 10 Mbps에서 동작한다
[1], [4].
또한 100BASE-T1은 제조 완료에 가까워지면 ECU의 캘리브레이션도 용이하게 해줄 수 있다. 100BASE-T1 이더넷을 이용해 데이터를 전송하면 캘리브레이션 시간이 줄어들어, 전체 제조 시간도 감소하게 된다.
100BASE-T1 PHY의 기초
“자동차에서의 이더넷” 부분에서 100BASE-T1의 이점들과 자동차 네트워크에서 전송되는 데이터의 유형들에 대해 언급했다. 그 다음 부분에서는 PHY 관점에서 100BASE-T1을 심층적으로 다루었다.
100BASE-T1이 어떻게 자동차 시스템의 EMI 요건, 저비용 요건, 케이블링 무게 감소 요건, 고 대역폭 요건을 충족하는지 설명하려 한다.
100Mbps 속도에서 EMI 감소를 위한 100BASE-T1의 인코딩 방식
100BASE-T1은 특유의 4B3B (4-bit to 3-bit), 3B2T (3-bit to 2-ternary pair), PAM 3 (threelevel pulse amplitude modulation) 인코딩 도식으로 패스트 이더넷에 비해 감소된 방출량을 달성한다.
100BASE-T1 PHY는 비차폐 싱글 연선 케이블을 통해 전송하기 전에 필요한 모든 스크램블링과 인코딩을 수행한다. 100BASE-T1은 기존 MII (Media Independent Interface)가 변하지 않았다는 점에서 MAC으로부터 투명하다. 현재 100BASE-T1에 사용되는 4개의 주요 xMII 가 있다.
•MII:
- 4-비트-와이드 데이터 인터페이스
- 송수신 제어
- 송수신 클록
•RMII(Reduced Media Independent Interface):
- 2-비트-와이드 데이터 인터페이스
- 송수신 제어
-싱글 클록 레퍼런스
• RGMII(Reduced Gigabit Media Independent Interface):
- 4-비트-와이드 데이터 인터페이스
- 송수신 제어
- 송수신 클록
• SGMII(Serial Gigabit Media Independent Interface):
- 2-핀 LVDS(low-voltage differential signaling) 수신 경로
- 2-핀 LVDS 송신 경로
.jpg)
그림 2는 인터페이스에 따른 MAC와 PHY의 시그널링을 보여주고 있다. MAC에서 데이터를 수신한 후, 이더넷 PHY는 그 데이터를 인코딩하고, 스크램블링하고, 직렬화한다[5]. 이러한 프로세스들은 PHY의 아날로그 프론트 엔드를 위한 데이터를 준비한 후, 그 데이터를 비차폐 싱글 연선 케이블을 통해 링크 파트너로 전송한다.
예를 들어, RGMII를 통해 MAC과 통신을 하는 100BASE-T1 PHY는 25MHz에서 클록킹 된 네 개의 병렬 비트를 수신하게 된다(총 100 Mbps). PHY는 이 네 개 비트를 세 개 비트로 변환하고 클록 주파수를 33 1/3MHz로 증가시켜 100Mbps 비트 레이트를 유지한다. (프레임을 셋으로 나눌 수 없는 경우, PHY는 스터핑 비트를 추가하여 변환이 제대로 이루어지게 한다. 링크 파트너가 이 스터핑 비트를 제거한 후 MAC으로 전송을 한다) 세 개 비트로 이루어진 각각의 그룹을 이용해 표 3의 기호 지도를 바탕으로 PHY가 3원 쌍(2T)을 생성한다. 마지막으로, 3원 쌍 벡터(TA, TB)가 66 2/3 MHz 기본 주파수에서 PAM 3(three-level pulse amplitude modulation)을 이용해 전송된다.
.jpg)
그림 3은 PHY를 통해 MII에서 MDI(Medium Dependent Interface)로 변환된 데이터를 보여주고 있다. PAM3 시그널을 보면, 모든 33 1/3 MHz 기간이 세 개 비트의 데이터를 대표하고 100 Mbps에서 데이터를 전송할 것임을 쉽게 알 수 있다. 이 시그널은(100Ω 차동 터미네이션으로 측정했을 때) 2.2V 미만의 피크-투-피크에서 세 개 전압 레벨(+1V, 0V, -1V)을 이용해 전송된다.
.jpg)
PAM3는 MDI에서 전송되는데, 여기에는 케이블을 위한 커넥터와 싱글 연선 케이블, 그리고 추가 로우패스 필터링 및 CM(common-mode) 거부에 쓰이는 패시브 외부 컴포넌트가 포함돼 있다. MDI 커넥터와 비차폐 싱글 연선 케이블의 조합은 100BASE-T1 표준 MDI 스펙에 명시된 리턴 손실, 변환 손실, 장애 공차 같은 전기 사양들을 충족해야 한다.
이더넷 프로토콜들은 목표 애플리케이션에 따라 스크램블링, 직렬화, 인코딩에 대해 저마다 다른 스펙을 가지고 있다. 비교하자면, 100BASE-TX는 MLT-3(Multi-Level Transmit)를 이용해 125 MHz에서 데이터를 전송한다. 기본 주파수는 100BASE-T1(66 2/3 MHz)보다 높으며, 송수신에 전용 연선이 필요하다.
100BASE-T1은 100BASE-TX의 절반에 가까운 33.3MHz의 대역폭만을 필요로 한다. 즉, 품질이 낮은 케이블을 사용하면서도(비용 절감) 더 나은 필터링으로 방출과 면역을 개선할 수 있다는 뜻이다. 이 두 가지는 자동차 애플리케이션에서 매우 중요하다. 또한 100BASE-T1의 3B2T 시그널 맵핑 방식과 100BASE-TX 4B5B의 MLT-3 인코딩을 통한 PAM3 변조를 이용하면 스펙트럼 효율이 증가한다. 그러면 동일한 양의 데이터를 전송하는데 필요한 대역폭이 줄어들어 방출도 줄어들게 된다.
비차폐 싱글 연선을 통한 데이터 송수신
100BASE-T1는 물리적 풀-듀플렉스 인터페이스로, 같은 페어에서 송신과 수신을 할 수 있다. 이것이 전용 페어에서 송신과 수신이 이루어지는 10BASE-T 및 100BASE-TX와 다른 점이다. 공유 미디어는 차량 내 전체 케이블의 무게를 줄여주어, 소재 비용의 절감은 물론 연비까지 개선시켜준다. 물리적 풀 듀플렉스는 중첩 원리를 통해 완성된다. 100BASE-T1 PHY는 집적 하이브리드를 가지고 있고, 에코 제거를 이용해 자체 송신 신호를 제거하고 링크 파트너로부터 수신 정보를 추출한다.
이를 위해 한 PHY가 마스터로 전용되고, 다른 한 개는 슬레이브로 전용된다. 두 개의 100BASE-T1 PHY를 연결하면, 그들은 트레이닝 프로세스를 거치게 되고, 그러면 DUT(device under test)와 링크 파트너 모두 같은 주파수와 같은 위상으로 정보를 전송하게 된다. 그림 4는 각 PHY 내의 하이브리드와 에코 제거에 관한 약식 블록 다이어그램이다.
.jpg)
추가 컴포넌트들
PAM3 시그널링이 보드를 떠나거나 들어오기 전에, 몇 개의 컴포넌트들이 그 신호를 송신과 수신에 맞게 조절한다. 이러한 외부 컴포넌트들의 목적은 MDI를 격리하여 그라운드 루프와 드라이버 DC 오프셋을 방지하고, CM 잡음 필터링을 개선하고, 방사성 방출을 줄이면서 높은 면역을 유지하는데 있다
[9], [12].
CM 잡음의 필터링
CMC (common-mode choke)는 MDI에서 CM 잡음을 필터링 한다. CM 잡음은 최대한 많이 줄여야 한다. 이것이 PHY의 리시버를 방해할 수 있기 때문이다. 또한 CM 잡음은 싱글-엔드 에너지원이기 때문에 방사성 방출량을 높인다. 표 4는 CMC를 100BASE-T1 PHY에서 사용하려면 충족해야 할 요건들을 나열하고 있다.
 DC 절연
DC 절연
그림 5는 100BASE-TX 와 100BASE-T1 둘 다에서 DC 절연을 달성하는 방법을 보여주고 있다.
.jpg)
100BASE-TX PHY는 그 PHY에 종속하여 중앙 탭 (PHY 쪽)이 DC 전압에 연결돼 있는 트랜스포머를 사용하는 것이 보통이다. 또한 이 트랜스포머는 Bob Smith 터미네이션(중앙 탭, 커넥터 쪽, 저항기를 통해 그라운드와 연결)을 이용해 CM 잡음 필터링을 개선한다
[12].
100BASE-T1은 단 두 개의 커패시터로 더 단순한 방식을 취하고 있다. 이 두 개의 커패시터는 DC 절연을 제공하고, 트랜스포머를 이용한 애플리케이션에 비해 솔루션 크기가 줄어든다. 그림 6은 전형적인 100BASE-T1 회로 구현을 보여주고 있다.
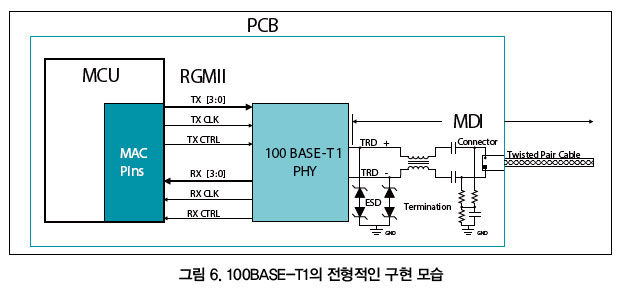
100BASE-T1 디자인 구현에 관한 자세한 내용은 자동차 표준-단독 게이트웨이 레퍼런스 디자인과 이더넷 및 CAN을 참고한다. 이 레퍼런스 디자인은 TI의 DP83TC811R-Q1 100BASE-T1 PHY를 전형적인 자동차 게이트웨이 애플리케이션으로 구현하고 있다. 이것은 100BASE-T1 표준을 바탕으로 이 디자인을 위해 선택된 모든 회로 컴포넌트들을 가지고 있다.
결론
100BASE-T1은 차량 네트워킹이 필요로 하는 바를 충족하고 있는 최초의 자동차 고유 이더넷 표준이다. 이것은 10BASE-T, 100BASE-TX, 1000BASE-T에서 배운 교훈을 바탕으로 구축된 것으로 엄격한 자동차 방출 요건, 케이블링 무게, 비용, 풋프린트 크기 등을 충족하고 있다. (자세한 내용은 TI DP83TC811S-Q1의 여러 가지 애플리케이션을 위한 솔루션-도해, 레이아웃, BOM 예제를 참고)
OEM 회사들은 차량에 100BASE-T1을 어떻게, 그리고 어디에 구현할 것인지 필연적으로 결정할 수 밖에 없다. 그렇기에 100BASE-T1은 결국에 차량 내 네트워킹의 채택을 용이하게 하여 자동차 시스템을 한층 더 발전시키게 될 게이트웨이 기술인 것이다.
참고문헌
1. C.M. Kozierok, C. Correa, R. Boatright and J. Quesnell. 자동차 이더넷 ? 최종 가이드. Intrepid Control Systems, 2014.
2. L. Bello. “자동차 통신의 이더넷 사례.” ACM SIGBED 리뷰 ? 실시간 네트워크에 관한 제10차 국제 워크숍 특별호 (RTN 2011), Vol. 8, No. 4, pp. 7-15, 2011.
3. D.A. Abaye. “BroadR-Reach 기술: 원 페어 이더넷을 가능하게 하다.” Broadcom Corp., 2012.
4. D. Pannell. “오디오 비디오 브릿징 (AVB) 가설 IEEE 802.1 AVB 총회.” IEEE 802.1 AVB, Stockholm, 2007.
5. “백서 블루레이 디스크 포맷 2.B 오디오 비쥬얼 애플리케이션 포맷의 BDROM 사양.” Blu-Ray Disc Association, 2005.
6. A. Aaron and D. Ronca. “고품질 비디오 인코딩 규모.” techblog.netflix.com, 2015.
7. “DVD 포럼 백서 HD DVD 포맷 개요.” DVD Forum, 2007.
8. R. Bielby. “ADAS 카메라 요건 ? 드라이빙 메모리에 필요한 것들.” Micron, 2017.
9. “IEEE 이더넷 표준 개정1: 싱글 밸런스드 연선 케이블에서의 100Mbps 동작을 위한 물리 레이어 스펙과 관리 파라미터들 (100BASE-T1).” IEEE Standard 802.3bw, pp. 39-63, 2015.
10. “IEEE 100BASE-T1 (이전 명칭 OABR).” Vector Informatik GmbH, Oct. 19, 2016. [Online]. 위치: https://elearning.vector.com/index.php?&wbt_ls_seite_id=1588373&root=378422&seite=vl_automotive_ethernet_introduction_en. [Accessed March 7, 2018].
11. R.J. Barry, E.A. Lee and D.G. Messershmitt. Digital Communication. Norwell, Massachusetts: Kluwer Academic Publishers Group, 2004.
12. “ENT-AN0098 애플리케이션 노트 마그네틱스 가이드” Microsemi, Aliso Viejo, California: 2016.
13. M. Sauerwald. “CAN 버스, 이더넷, FPD-링크: 자동차 통신에 무엇이 최선일까?” Texas Instruments Analog Applications Journal SLYT560, 2014.
<저작권자(c)스마트앤컴퍼니. 무단전재-재배포금지>